Krokový motor
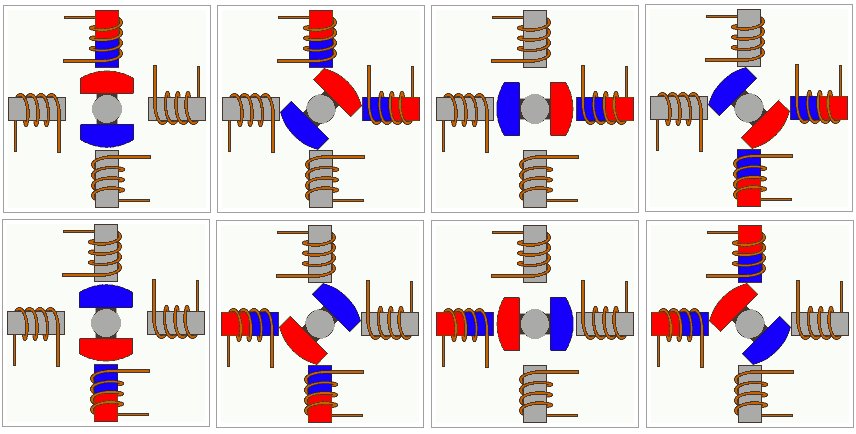
Krokový motor je speciální druh vícepólového synchronního motoru. Využívá se především tam, kde je potřebné přesně řadit nejen otáčky, ale také konkrétní polohu rotoru. Používají se v přesné mechanice, regulační technice, robotice apod. Základní princip krokového motoru je - proud procházející cívkou statoru vytvoří magnetické pole, které přitáhne opačný pól magnetu rotoru. Motor je schopný v této poloze přesně stát. Vhodnou kombinací zapojení cívek vznikne rotující krokové magnetické pole, které nejenže otáčí rotorem, ale zabezpečuje i jeho přesnou polohu vůči statoru. Kvůli přechodovým jevům je rychlost otáčení motoru limitovaná. Při jeho překročení motor začne ztrácet kroky.
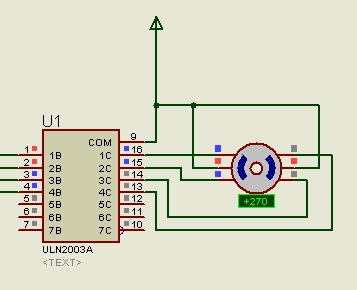
Podle způsobu řízení krokových motorů rozeznáváme unipolární a bipolární motory. Při unipolárním řízení prochází proud v jednom okamžiku právě jednou cívkou. Výhodou je malý odběr, nevýhodou malý kroutící moment. Při bipolárním řízení prochází proud vždy dvěma protilehlými cívkami s navzájem opačně orientovanými magnetickými poli. Výhodou je větší kroutící moment, větší stabilita kroku, nevýhodou vyšší spotřeba.


- Obrázky jsou použity z http://robotika.cz/articles/steppers/cs
Zajímavé konstrukce:
www:
- Krokový motor
- Řídící jednotka krokového motoru Navržené zařízení bylo vyvinuto v rámci semestrální práce do předmětu Mikroprocesorová technika na VOŠ v Kutné Hoře.
- Krokové motory Kamil Řezáč, 2002-10-28 princip funkce, metody řízení
- Driver pro bipolární krokový motor
Reference
V tomto článku je použit překlad textu z článku Elektromotor na slovenské Wikipedii.