AplMIT: Porovnání verzí
Skočit na navigaci
Skočit na vyhledávání
Bez shrnutí editace |
|||
| (Není zobrazeno 96 mezilehlých verzí od 2 dalších uživatelů.) | |||
| Řádek 1: | Řádek 1: | ||
[[Soubor:D10_AplMIT_s1.jpg|200px|left]] | |||
[[Soubor:PovinnaPrace_VyvojMIT_aplikace.png|right|link=Vývoj MIT aplikace]] | |||
{| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" | |||
| colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Plán''''' | |||
|- | |||
| | |||
T0 - BOZP – řády odborných učeben | |||
T1 - Vývoj MIT aplikace s UNI deskou | |||
T2 - Realizace mikroprocesorové sestavy | |||
T3 - Programování světelné křižovatky | |||
T4 - Programování aplikace automatické pračky | |||
T5 - Zpracování povinné práce | |||
T6 - Návrh a editace el. schéma a DPS s prvky SMD | |||
T7 - SMT – význam a výhody, pájení | |||
T8 - Zpracování povinné práce | |||
T9 - Vývoj aplikace s robotem – zadání úloh 1 | |||
T10 - Vývoj aplikace s robotem – zadání úloh 2 | |||
T11 - Vývoj aplikace s robotem – zadání úloh 3 | |||
T12 - Zpracování povinné práce | |||
T13 - Opakování k maturitě | |||
|} | |||
{| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" | |||
| colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Domácí úkoly 2020''''' | |||
|- | |||
| | |||
T9 - Vývoj aplikace s robotem – zadání úloh 1 | |||
* V IDE (MCU8051IDE, TinkerCad) navrhněte a otestujte zapojení s mikroprocesorem, který bude ovládat 2 motory (robota), který bude jezdit 30 vteřin nestále do čtverce o straně 50 cm. Každý úspěšný experiment zpracujte v postupně rozšiřující dokumentaci. Tu zde odevzdejte jako součást textu. | |||
* nejlepší řešení: | |||
[[Soubor:tinkercad-robot.gif|link=https://imgur.com/a/te1xL0w]] | |||
* V IDE (MCU8051IDE, TinkerCad) navrhněte a otestujte zapojení s mikroprocesorem, který bude ovládat 2 motory (robota). Robot bude obsahovat čidlo překážky (dotyku apod.) Pokud robot při jízdě narazí na překážku, couvne, otočí o o 120°st. a rozjede se znovu vpřed. Opět platí, že každý úspěšný experiment zpracujete v postupně rozšiřující dokumentaci a tu zde odevzdejte. | |||
* V IDE (MCU8051IDE, TinkerCad) navrhněte a otestujte zapojení s mikroprocesorem, který bude ovládat 2 motory (robota). Robot pojede čáře. | |||
* Napište program dle zadání v příloze | |||
T10 - Vývoj aplikace s robotem – zadání úloh 2 | |||
T11 - Vývoj aplikace s robotem – zadání úloh 3 | |||
T12 - Zpracování povinné práce | |||
T13 - Opakování k maturitě | |||
|} | |||
{| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" | |||
| colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Aplikace mikroprocesorové techniky AplMIT''''' | |||
|- | |||
| | |||
{{AplMIT - charakteristika oddělení}} | |||
|} | |||
{| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" | |||
| colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Cvičení''''' | |||
|- | |||
| | |||
{{AplMIT - TP}} | |||
|} | |||
{| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" | |||
| colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Domácí úkoly''''' | |||
|- | |||
| | |||
{{AplMIT - homework}} | |||
|} | |||
{| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" | |||
| colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Náhradní práce''''' | |||
|- | |||
| | |||
{{AplMIT - extra work}} | |||
|} | |||
{| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" | |||
| colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Otázky k opakování na MAT zkoušku''''' | |||
|- | |||
| | |||
{{Aplmit - otázky k opakování}} | |||
|} | |||
{| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" | |||
| colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Testové otázky''''' | |||
|- | |||
| | |||
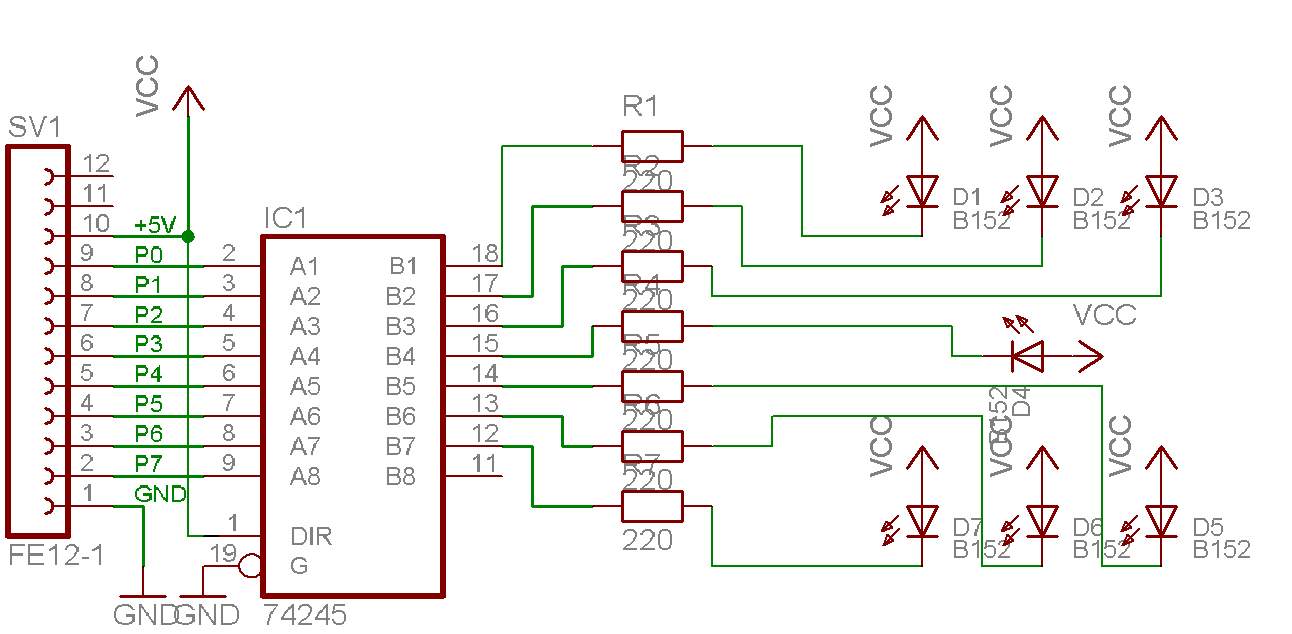
# HW: Nakreslete minimální schéma MIT aplikace s MCU, ke které bude připojena jedna vstupní periferie a dvě výstupní (výběr dle vlastního uvážení). Včetně vyřešeného zdroje pro napájení MCU. K dispozici zdroj nestabilizováného stejnosměrného napětí +9 až 12 V a součástky dle vlastního výběru. | |||
# SW: Napište program pro řízení LED, která bude blikat s cca frekvencí 1Hz jen při aktivovaném tlačítku | |||
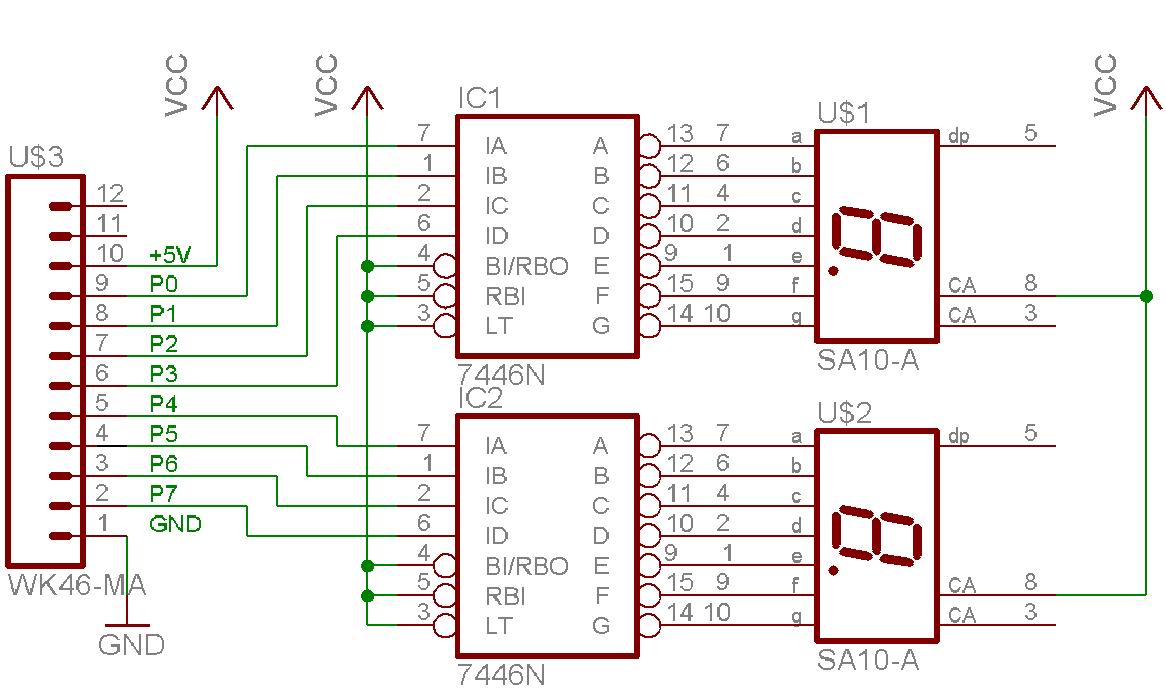
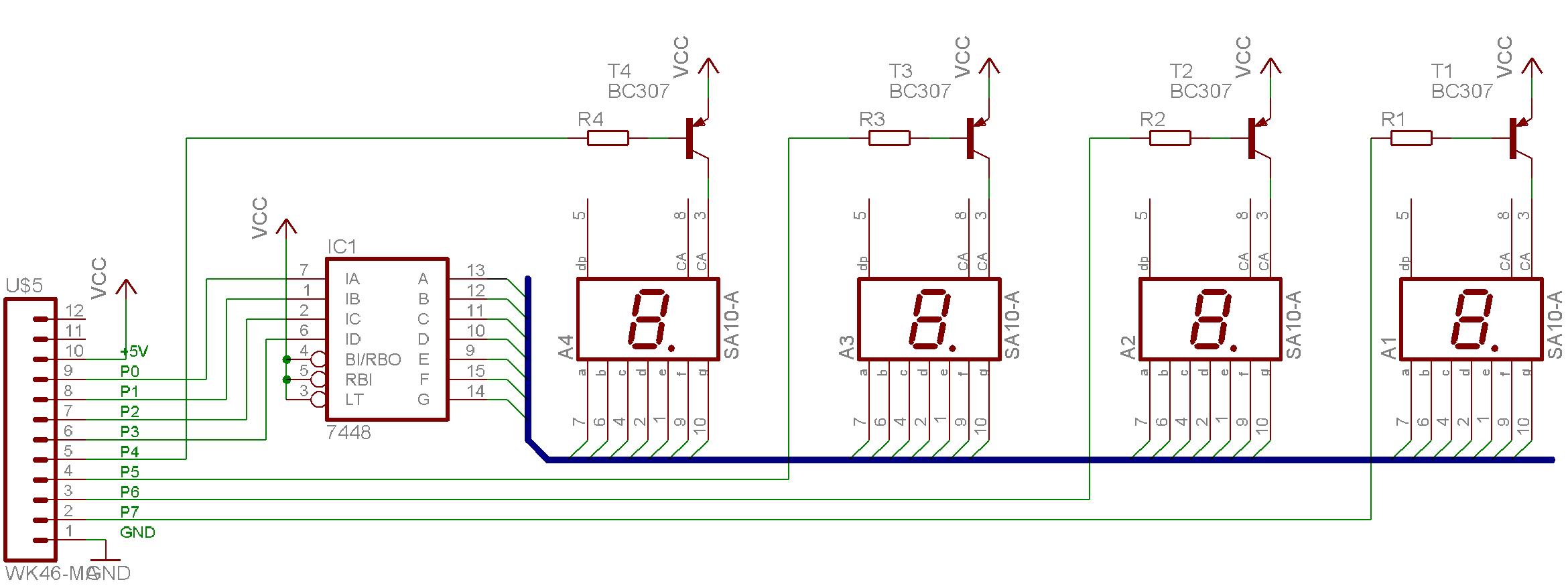
# HW: Nakreslete schéma 7segmentového displeje připojeného k MCU | |||
# SW: Napište program, u kterého se vždy po aktivaci tlačítka změní stav na displeji o jedničku větší (0, 1, 2, 3, 4, 5 a zase od začátku) | |||
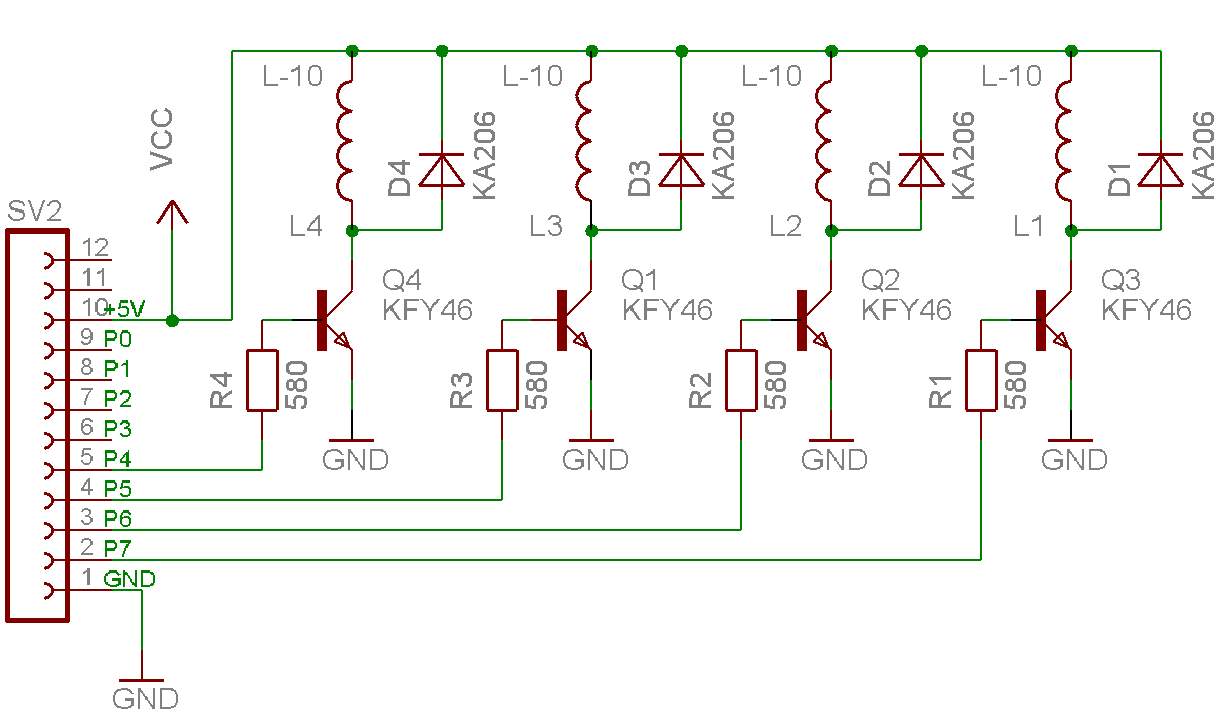
# HW: Nakreslete schéma zapojení krokového motoru k MCU | |||
# SW: Napište program, pro krokový motor, který se bude cca 10 sekund točit jedním směrem a dalších 10 sekund opačným. | |||
|} | |||
{| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 20em" | |||
| colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Registrace povinné práce''''' | |||
|- | |||
| colspan="2" style="text-align: center;" | | |||
|- style="vertical-align: top;" | |||
| | |||
<html> | |||
<p><iframe height="1100" frameborder="0" width="200" src="http://spreadsheets0.google.com/embeddedform?formkey=dG1MckI0SE05ckQ5R1Vxd0RKSGk2elE6MA" marginheight="0" marginwidth="0">Načítání...</iframe></p> | |||
</html> | |||
|} | |||
<br><br><br><br><br><br><br><br><br><br><br><br><br><br><br> | |||
== Témata na cvičení == | |||
Basic: | |||
<Gallery> | |||
Soubor:nxt-2.jpg|[[NXT]] | |||
Soubor:Logo.JPG|[[LOGO]] | |||
Soubor:Vyvoj-mit-001.jpg|[[8051]] | |||
</Gallery> | |||
Clasic: | |||
<Gallery> | |||
Modul02.jpg|[[Výstupní moduly]] | |||
IN01_-_modul_DIP-SWITCH.jpg|[[Vstupní moduly]] | |||
Soubor:D10-Moduly-krizovatka-04.jpg|[[Šablona:MIT_sestavy|Sestavy]] | |||
</Gallery> | |||
NEW: | |||
<Gallery> | |||
Soubor:D10_HW_picaxe_01.jpg|[[PICAXE]] | |||
Soubor:boebot.jpg|[[BOB]] | |||
Soubor:AVR-PRG-01.jpg|[[AVR]] s [[Vývojová deska ATMEL včetně AVR ATmega16 v2|Vývojovou deskou]] | |||
</Gallery> | |||
Excelent: | |||
<Gallery> | |||
Soubor:Arduino_01.jpg|[[Arduino]] | |||
Soubor:SOC_2011_002.jpg|[[Robot RC-DC]] | |||
Soubor:SOC_2011_001.jpg|[[Mobilní robot]] | |||
Soubor:LOXONE_titul.png|[[Loxone]] | |||
</Gallery> | |||
== Bloková schémata v [[ProfiCAD]]u == | |||
<Gallery> | |||
Soubor:MCU-blok-schema-01.png|8051 s LED a DIP | |||
Soubor:MCU-blok-schema-02.png|Křižovatka | |||
Soubor:MCU-blok-schema-04.png|Pračka | |||
</Gallery> | |||
== Vývojové diagramy v [[PICAXE]] == | |||
<Gallery> | |||
Soubor:PICAXE-vyv-diagram_01.jpg|Blik | |||
Soubor:PICAXE-vyv-diagram_02.jpg|DICE | |||
Soubor:PICAXE-vyv-diagram.jpg|2x IN, 2 x OUT | |||
</Gallery> | |||
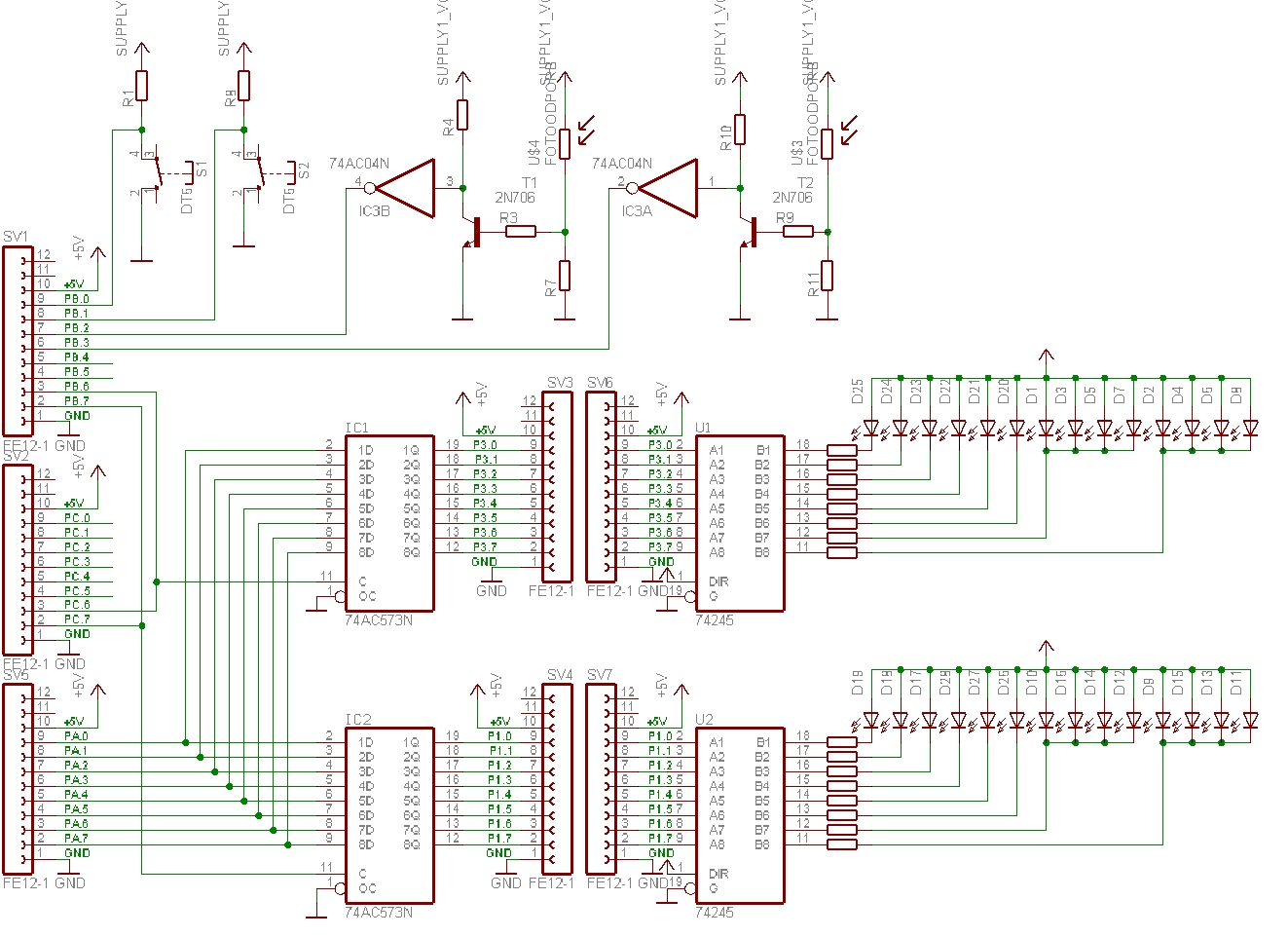
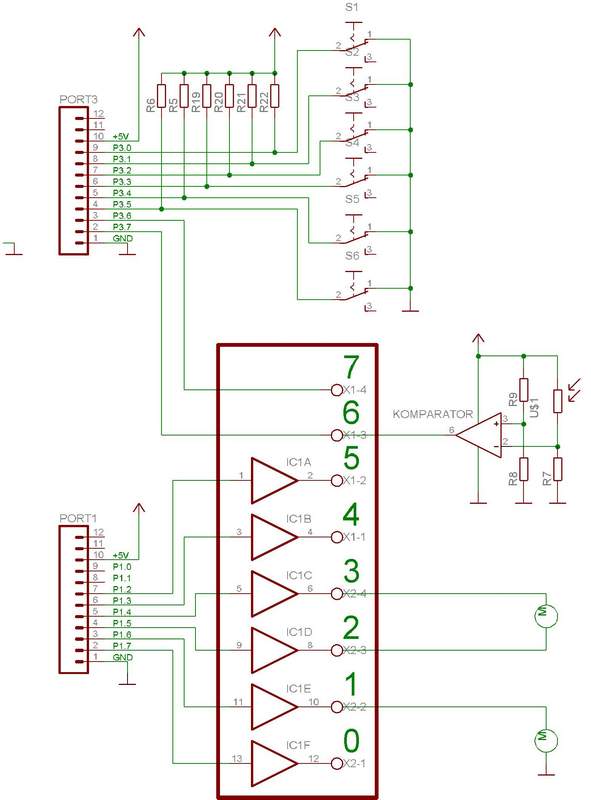
== Elektrická schéma v [[EAGLE]] == | |||
<Gallery> | |||
Soubor:89S51-sch.png|HW: [[ATM80|UNI board s 89S52]] | |||
Soubor:ATM13.png|HW: [[ATM13|UNI board s 89S52]] | |||
</Gallery> | |||
== Simulace == | |||
<Gallery> | |||
Soubor:Multisim.jpg|[[Multisim]] - simulace el. obvodu | |||
Soubor:Proteus.jpg|[http://www.labcenter.com/index.cfm Proteus Design Suit] | |||
</gallery> | |||
==LOGO== | |||
<!------- TABULKA - DESIGN -------> | |||
{| style="padding: 0px; width: 50%; margin-top: 4px;" | |||
| style="width: 60%; vertical-align: top;" | | |||
{{LOGO Úlohy na cvičení}} | |||
|} | |||
==MIT vývoj aplikace s MCU == | |||
<!------- TABULKA - DESIGN -------> | |||
{| style="padding: 0px; width: 50%; margin-top: 4px;" | |||
| style="width: 50%; vertical-align: top;" | | |||
{{MIT Úlohy na cvičení}} | |||
|} | |||
==Robotika s NXT== | |||
<!------- TABULKA - DESIGN -------> | |||
{| style="padding: 0px; width: 50%; margin-top: 4px;" | |||
| style="width: 60%; vertical-align: top;" | | |||
{{NXT Úlohy na cvičení}} | |||
|} | |||
==Robotika s BOB== | |||
<!------- TABULKA - DESIGN -------> | |||
{| style="padding: 0px; width: 50%; margin-top: 4px;" | |||
| style="width: 50%; vertical-align: top;" | | |||
<!------- Robotika s [[BOB]]: -------> | |||
<div style="border: 1px solid rgb(245, 223, 154); background-color: rgb(255, 254, 251); font-size: 90%; margin-bottom: 5px;" > | |||
<div style="border-style: solid; border-color: rgb(205, 183, 114); border-width: 0px 0px 1px; height: 16pt; background-color: rgb(245, 223, 154); font-weight: bolder; position: relative;"> | |||
<div style="position: absolute; top: 0pt; left: 0pt;"></div> | |||
<div style="padding-left: 35px;">Robotika s [[BOB]]:</div></div> | |||
<div style="margin: 0.5em; clear: both; font-size: 95%; padding-top: 0.5em;"> | |||
[[Soubor:boebot.jpg|thumb]] | |||
Úkoly jsou zcela identické jako s robotem [[NXT]] ale tentkráte s robotem [[BOB]] | |||
<br><br><br><br><br><br><br><br><br> | |||
</div></div> | |||
|} | |||
---- | ---- | ||
[[ | ==Realizace povinné ročníkové práce s [[Zajímavá zapojení s MCU|MCU]]== | ||
<!------- TABULKA - DESIGN -------> | |||
{| style="padding: 0px; width: 50%; margin-top: 4px;" | |||
| style="width: 50%; vertical-align: top;" | | |||
<!------- MIT realizace: -------> | |||
<div style="border: 1px solid rgb(245, 223, 154); background-color: rgb(255, 254, 251); font-size: 90%; margin-bottom: 5px;" > | |||
<div style="border-style: solid; border-color: rgb(205, 183, 114); border-width: 0px 0px 1px; height: 16pt; background-color: rgb(245, 223, 154); font-weight: bolder; position: relative;"> | |||
<div style="position: absolute; top: 0pt; left: 0pt;"></div> | |||
<div style="padding-left: 35px;">[[Zajímavá zapojení s MCU|MIT]] realizace:</div></div> | |||
<div style="margin: 0.5em; clear: both; font-size: 95%; padding-top: 0.5em;"> | |||
Náměty [[Zajímavá zapojení s MCU|zde]]. | |||
| |||
Registrace [[PRA_Povinné_práce|zde]]. | |||
| |||
[[Objednávky součástek na PP SOČ MP|Objednávka součástek]] [[Soubor:E-shop_www.gif|50x51px|link=http://wiki.sps-pi.com/index.php/Objedn%C3%A1vky_sou%C4%8D%C3%A1stek_na_PP_SO%C4%8C_MP|e-shop]] | |||
[[Soubor:GDPR.jpg|link=https://www.gdpr.cz/gdpr/]] | |||
</div></div> | |||
|} | |||
Přehled povinných prací předmětu [[PRA]] | |||
[[Soubor:GDPR.jpg|link=https://www.gdpr.cz/gdpr/]] | |||
[[Category:PRA]] | [[Category:PRA]] | ||
[[Category:Předměty]] | [[Category:Předměty]] | ||
Aktuální verze z 12. 12. 2023, 09:23

| Plán | |
T0 - BOZP – řády odborných učeben T1 - Vývoj MIT aplikace s UNI deskou T2 - Realizace mikroprocesorové sestavy T3 - Programování světelné křižovatky T4 - Programování aplikace automatické pračky T5 - Zpracování povinné práce T6 - Návrh a editace el. schéma a DPS s prvky SMD T7 - SMT – význam a výhody, pájení T8 - Zpracování povinné práce T9 - Vývoj aplikace s robotem – zadání úloh 1 T10 - Vývoj aplikace s robotem – zadání úloh 2 T11 - Vývoj aplikace s robotem – zadání úloh 3 T12 - Zpracování povinné práce T13 - Opakování k maturitě | |
| Domácí úkoly 2020 | |
T9 - Vývoj aplikace s robotem – zadání úloh 1
T10 - Vývoj aplikace s robotem – zadání úloh 2 T11 - Vývoj aplikace s robotem – zadání úloh 3 T12 - Zpracování povinné práce T13 - Opakování k maturitě | |
| Aplikace mikroprocesorové techniky AplMIT | ||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||

| Cvičení | |
| |
| Domácí úkoly | |
Domácí úkoly:
| |

| Náhradní práce | |
Pozn:
| |
| Otázky k opakování na MAT zkoušku | ||
Teoretické otázky:
Praktické otázky:
Zdroj informací v pdf na šk. síti:
| ||
| Testové otázky | |
| |
| Registrace povinné práce | |
|
| |
Témata na cvičení
Basic:


Clasic:



NEW:



Excelent:




Bloková schémata v ProfiCADu
-
 8051 s LED a DIP
8051 s LED a DIP -
 Křižovatka
Křižovatka -
 Pračka
Pračka



Vývojové diagramy v PICAXE
-
 Blik
Blik -
 DICE
DICE -
 2x IN, 2 x OUT
2x IN, 2 x OUT


Elektrická schéma v EAGLE


Simulace
-
 Multisim - simulace el. obvodu
Multisim - simulace el. obvodu -



LOGO
|
LOGO - úlohy na cvičení
DÚ:
|
MIT vývoj aplikace s MCU
|
 Praktické úkoly:
|
Robotika s NXT
|
Robotika s NXT: 
|
Robotika s BOB
Realizace povinné ročníkové práce s MCU
|
MIT realizace: Náměty zde.
Registrace zde.
Objednávka součástek
|

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Přehled povinných prací předmětu PRA
