|
|
| (Není zobrazeno 58 mezilehlých verzí od stejného uživatele.) |
| Řádek 1: |
Řádek 1: |
| {| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 40em" | | [[Soubor:D10_AplMIT_s1.jpg|200px|left]] |
| | colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Aplikace mikroprocesorové techniky AplMIT''''' | | [[Soubor:PovinnaPrace_VyvojMIT_aplikace.png|right|link=Vývoj MIT aplikace]] |
| | |
| | {| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" |
| | | colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Plán''''' |
| |- | | |- |
| | colspan="2" style="text-align: center;" |
| | | |
| |- style="vertical-align: top;"
| | T0 - BOZP – řády odborných učeben |
| | '''Pojetí předmětu:''' || Toto oddělení navštěvují studenti 4.ročníku oboru vzdělávání 26-41-M/01 [[Elektrotechnika]].
| | T1 - Vývoj MIT aplikace s UNI deskou |
| |- style="vertical-align: top;"
| | T2 - Realizace mikroprocesorové sestavy |
| | '''Cílové vědomosti:''' || Znalost problematiky vývoje mikroprocesorové aplikace.
| | T3 - Programování světelné křižovatky |
| |- style="vertical-align: top;"
| | T4 - Programování aplikace automatické pračky |
| | '''Cílové dovednosti:''' || Praktické aplikace teoretických poznatků při realizaci obvodů obsahující mikroprocesory.
| | T5 - Zpracování povinné práce |
| |- style="vertical-align: top;"
| | T6 - Návrh a editace el. schéma a DPS s prvky SMD |
| | '''Organizace výuky:''' || 2,5 týdně = 5 hod 1 x za 3 x 14 dní při třech skupinách. 20hodin za rok pro jednu skupinu).
| | T7 - SMT – význam a výhody, pájení |
| |- style="vertical-align: top;"
| | T8 - Zpracování povinné práce |
| | '''Obsah cvičení:''' ||
| | T9 - Vývoj aplikace s robotem – zadání úloh 1 |
| Realizace praktických úkolů: | | T10 - Vývoj aplikace s robotem – zadání úloh 2 |
| * s programovatelným logickým automatem [[LOGO]]
| | T11 - Vývoj aplikace s robotem – zadání úloh 3 |
| * vyvoj mikroprocesorové aplikace s MCU např.:[[8051]]
| | T12 - Zpracování povinné práce |
| * realizace mikroprocesorové aplikace s MCU
| | T13 - Opakování k maturitě |
| * programování robotů [[NXT]] a [[BOB]].
| |
| |- style="vertical-align: top;"
| |
| | '''Učebna:''' || [[D10]]
| |
| |- style="vertical-align: top;"
| |
| | '''Učitel:''' || [[JA]]
| |
| |- style="vertical-align: top;"
| |
| | '''Tématický plán:''' || [ftp://obelix.sps-pi.cz/m/Dokumenty_sps/PRA/01%20-%20Tematicke%20plany/PRA%20C4%20D4%20AplMit%20JA.doc PRA C4 D4 AplMit JA.doc]
| |
| |- style="vertical-align: top;"
| |
| | '''Předpoklady:''' || Znalosti a dovednosti z [[CIT]] [[MIT]] [[ELT2]] [[INS2]]
| |
| |- style="vertical-align: top;"
| |
| | '''[[HW]]:''' || [[LOGO]] [[RD2 kit]] [[EasySoft]] [[NXT]] [[BOB]] [[ROR]] + vše v učebně [[D10]]
| |
| |- style="vertical-align: top;
| |
| | '''[[SW]]:''' || [[LOGO]] [[Eagle]] [[MPLAB]] [[Ride51]] [[Flip]] [[NXT-G]] [[BricxCC]] [[BS2]] [[UP]] [[SAP]] [[Diagram Designer]]
| |
| |- style="vertical-align: top;"
| |
| | '''Doporučená literatura:''' || [[LOGO]] [[MIT]] [[NXT]] [[BOB]] nebo na školním [ftp://obelix.sps-pi.cz/n/janousek/mikroLAB/26_LOGO!%20Siemens ftp: LOGO] [ftp://obelix.sps-pi.cz/n/janousek/mikroLAB/05_MIT ftp: MIT] ([[IN obvody]], [[OUT obvody]], [[sestavy]] ) [ftp://obelix.sps-pi.cz/n/janousek/mikroLAB/66_NXT_Robot%20LEGO%20Mindstorms ftp:NXT] [ftp://obelix.sps-pi.cz/n/janousek/mikroLAB/63_BOB_Robot%20Boe-Bot ftp:BOB]
| |
| |- style="vertical-align: top;"
| |
| | '''Opakovací otázky:''' || [ftp://obelix.sps-pi.cz/N/janousek/PRA-APLMIT/01_Teoreticke%20otazky%20PRA-APLMIT.pdf Teoretické otázky] [ftp://obelix.sps-pi.cz/N/janousek/PRA-APLMIT/02_Prakticke%20otazky%20PRA-APLMIT.pdf Praktické otázky]
| |
| |- style="vertical-align: top;"
| |
| | '''Povinné práce'''|| Přehled i zadávací formulář povinné práce u [[RR]] [[PRA_Povinné_práce|zde]]
| |
| |- style="vertical-align: top;"
| |
| | '''Objednávky:'''|| součástek na PP SOČ MP [[Objednávky součástek na PP SOČ MP|zde]]
| |
| |- style="vertical-align: top;"
| |
| | '''Náměty:'''|| [[Zajímavá zapojení s MCU]] např pro [[PRA_Povinné_práce|povinné práce]] nebo [[MP-JA|maturitní práce]]
| |
| |- style="vertical-align: top;"
| |
| | tagy pro učitele: ||
| |
| * [ftp://obelix.sps-pi.cz/N/janousek/PRA-APLMIT/00_JA/02_Prezentace/PRA_APLMIT_00_vyuka.ppt PRA_APLMIT_00_vyuka.ppt]
| |
| * [ftp://obelix.sps-pi.cz/N/janousek/PRA-APLMIT/00_JA/02_Prezentace/PRA_APLMIT_01_vystupni%20moduly.ppt PRA_APLMIT_01_vystupni moduly.ppt]
| |
| * [ftp://obelix.sps-pi.cz/N/janousek/PRA-APLMIT/00_JA/02_Prezentace/PRA_APLMIT_03_sestavy.ppt PRA_APLMIT_03_sestavy.ppt]
| |
| |} | | |} |
|
| |
| [[Soubor:D10_AplMIT_s1.jpg|thumb|left]]
| |
|
| |
|
| |
|
|
| |
|
| | {| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" |
| | | colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Domácí úkoly 2020''''' |
| | |- |
| | | |
|
| |
|
| | T9 - Vývoj aplikace s robotem – zadání úloh 1 |
| | * V IDE (MCU8051IDE, TinkerCad) navrhněte a otestujte zapojení s mikroprocesorem, který bude ovládat 2 motory (robota), který bude jezdit 30 vteřin nestále do čtverce o straně 50 cm. Každý úspěšný experiment zpracujte v postupně rozšiřující dokumentaci. Tu zde odevzdejte jako součást textu. |
| | * nejlepší řešení: |
|
| |
|
| | [[Soubor:tinkercad-robot.gif|link=https://imgur.com/a/te1xL0w]] |
| | * V IDE (MCU8051IDE, TinkerCad) navrhněte a otestujte zapojení s mikroprocesorem, který bude ovládat 2 motory (robota). Robot bude obsahovat čidlo překážky (dotyku apod.) Pokud robot při jízdě narazí na překážku, couvne, otočí o o 120°st. a rozjede se znovu vpřed. Opět platí, že každý úspěšný experiment zpracujete v postupně rozšiřující dokumentaci a tu zde odevzdejte. |
| | * V IDE (MCU8051IDE, TinkerCad) navrhněte a otestujte zapojení s mikroprocesorem, který bude ovládat 2 motory (robota). Robot pojede čáře. |
| | * Napište program dle zadání v příloze |
|
| |
|
| | T10 - Vývoj aplikace s robotem – zadání úloh 2 |
| | T11 - Vývoj aplikace s robotem – zadání úloh 3 |
| | T12 - Zpracování povinné práce |
| | T13 - Opakování k maturitě |
| | |} |
|
| |
|
|
| |
|
| | {| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" |
| | | colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Aplikace mikroprocesorové techniky AplMIT''''' |
| | |- |
| | | |
| | {{AplMIT - charakteristika oddělení}} |
| | |} |
|
| |
|
| | {| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" |
| | | colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Cvičení''''' |
| | |- |
| | | |
| | {{AplMIT - TP}} |
| | |} |
|
| |
|
| | {| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" |
| | | colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Domácí úkoly''''' |
| | |- |
| | | |
| | {{AplMIT - homework}} |
| | |} |
|
| |
|
| | {| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" |
| | | colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Náhradní práce''''' |
| | |- |
| | | |
| | {{AplMIT - extra work}} |
| | |} |
|
| |
|
|
| |
|
| | {| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" |
| | | colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Otázky k opakování na MAT zkoušku''''' |
| | |- |
| | | |
| | {{Aplmit - otázky k opakování}} |
|
| |
|
| | |} |
|
| |
|
| | {| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" |
| | | colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Testové otázky''''' |
| | |- |
| | | |
|
| |
|
| | # HW: Nakreslete minimální schéma MIT aplikace s MCU, ke které bude připojena jedna vstupní periferie a dvě výstupní (výběr dle vlastního uvážení). Včetně vyřešeného zdroje pro napájení MCU. K dispozici zdroj nestabilizováného stejnosměrného napětí +9 až 12 V a součástky dle vlastního výběru. |
| | # SW: Napište program pro řízení LED, která bude blikat s cca frekvencí 1Hz jen při aktivovaném tlačítku |
| | # HW: Nakreslete schéma 7segmentového displeje připojeného k MCU |
| | # SW: Napište program, u kterého se vždy po aktivaci tlačítka změní stav na displeji o jedničku větší (0, 1, 2, 3, 4, 5 a zase od začátku) |
| | # HW: Nakreslete schéma zapojení krokového motoru k MCU |
| | # SW: Napište program, pro krokový motor, který se bude cca 10 sekund točit jedním směrem a dalších 10 sekund opačným. |
|
| |
|
| | |} |
|
| |
|
| | {| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 20em" |
| | | colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''Registrace povinné práce''''' |
| | |- |
| | | colspan="2" style="text-align: center;" | |
| | |- style="vertical-align: top;" |
| | | |
| | <html> |
| | <p><iframe height="1100" frameborder="0" width="200" src="http://spreadsheets0.google.com/embeddedform?formkey=dG1MckI0SE05ckQ5R1Vxd0RKSGk2elE6MA" marginheight="0" marginwidth="0">Načítání...</iframe></p> |
| | </html> |
| | |} |
| | |
|
| |
|
| | <br><br><br><br><br><br><br><br><br><br><br><br><br><br><br> |
| | == Témata na cvičení == |
|
| |
|
| | Basic: |
| | <Gallery> |
| | Soubor:nxt-2.jpg|[[NXT]] |
| | Soubor:Logo.JPG|[[LOGO]] |
| | Soubor:Vyvoj-mit-001.jpg|[[8051]] |
| | </Gallery> |
|
| |
|
| | Clasic: |
| | <Gallery> |
| | Modul02.jpg|[[Výstupní moduly]] |
| | IN01_-_modul_DIP-SWITCH.jpg|[[Vstupní moduly]] |
| | Soubor:D10-Moduly-krizovatka-04.jpg|[[Šablona:MIT_sestavy|Sestavy]] |
| | </Gallery> |
|
| |
|
| | NEW: |
| | <Gallery> |
| | Soubor:D10_HW_picaxe_01.jpg|[[PICAXE]] |
| | Soubor:boebot.jpg|[[BOB]] |
| | Soubor:AVR-PRG-01.jpg|[[AVR]] s [[Vývojová deska ATMEL včetně AVR ATmega16 v2|Vývojovou deskou]] |
| | </Gallery> |
|
| |
|
| == Úkoly: ==
| | Excelent: |
| | <Gallery> |
| | Soubor:Arduino_01.jpg|[[Arduino]] |
| | Soubor:SOC_2011_002.jpg|[[Robot RC-DC]] |
| | Soubor:SOC_2011_001.jpg|[[Mobilní robot]] |
| | Soubor:LOXONE_titul.png|[[Loxone]] |
| | </Gallery> |
|
| |
|
| * Registrace do kurzu [http://moo.sps-pi.cz/course/view.php?id=53 AplMIT] pro organizační účely:
| | == Bloková schémata v [[ProfiCAD]]u == |
|
| |
|
| | <Gallery> |
| | Soubor:MCU-blok-schema-01.png|8051 s LED a DIP |
| | Soubor:MCU-blok-schema-02.png|Křižovatka |
| | Soubor:MCU-blok-schema-04.png|Pračka |
| | </Gallery> |
|
| |
|
| | == Vývojové diagramy v [[PICAXE]] == |
|
| |
|
| == Úlohy na cvičení: ==
| | <Gallery> |
| a následně i praktickou maturitní zkoušku:
| | Soubor:PICAXE-vyv-diagram_01.jpg|Blik |
| | Soubor:PICAXE-vyv-diagram_02.jpg|DICE |
| | Soubor:PICAXE-vyv-diagram.jpg|2x IN, 2 x OUT |
| | </Gallery> |
|
| |
|
| T1 - [[LOGO]] programovatelný logický obvod:
| | == Elektrická schéma v [[EAGLE]] == |
|
| |
|
| T2 - [[Vývoj MIT aplikace s 8051|MIT]] vývoj:
| | <Gallery> |
| | Soubor:89S51-sch.png|HW: [[ATM80|UNI board s 89S52]] |
| | Soubor:ATM13.png|HW: [[ATM13|UNI board s 89S52]] |
| | </Gallery> |
|
| |
|
| T3 - [[Zajímavá zapojení s MCU|MIT]] realizace u [[RR]]:
| | == Simulace == |
|
| |
|
| T4 - Robotika s [[NXT]]:
| | <Gallery> |
| | Soubor:Multisim.jpg|[[Multisim]] - simulace el. obvodu |
| | Soubor:Proteus.jpg|[http://www.labcenter.com/index.cfm Proteus Design Suit] |
| | </gallery> |
|
| |
|
| | ==LOGO== |
|
| |
|
| T5 - Robotika s [[BOB]]:
| |
| <!------- TABULKA - DESIGN -------> | | <!------- TABULKA - DESIGN -------> |
| {| style="padding: 0px; width: 100%; margin-top: 4px;" | | {| style="padding: 0px; width: 50%; margin-top: 4px;" |
| | style="width: 50%; vertical-align: top;" | | | | style="width: 60%; vertical-align: top;" | |
|
| |
|
| <!------- LOGO: ------->
| | {{LOGO Úlohy na cvičení}} |
| <div style="border: 1px solid rgb(245, 223, 154); background-color: rgb(255, 254, 251); font-size: 90%; margin-bottom: 5px;" >
| |
| <div style="border-style: solid; border-color: rgb(205, 183, 114); border-width: 0px 0px 1px; height: 16pt; background-color: rgb(245, 223, 154); font-weight: bolder; position: relative;">
| |
| <div style="position: absolute; top: 0pt; left: 0pt;"></div>
| |
| <div style="padding-left: 35px;">[[LOGO]] programovatelný logický obvod:</div></div>
| |
| <div style="margin: 0.5em; clear: both; font-size: 95%; padding-top: 0.5em;">
| |
| [[Soubor:Logo brana s.jpg|thumb]]
| |
| [[Soubor:Logo04.jpg|thumb]]
| |
| [[Soubor:logo02.jpg|thumb]]
| |
| [[Soubor:logo05.jpg|thumb]]
| |
|
| |
|
| '''Úkoly:'''
| | |} |
|
| |
|
| # Navrhněte [[KLO|Kombinační logický obvod]] s 3vstupy, zjistěte pravdivostní tabulku. vzor: [ftp://obelix.sps-pi.cz/n/janousek/mikroLAB/26_LOGO%21%20Siemens/12.06_navrh_KLO_LOGO.lsc 12.06_navrh_KLO_LOGO.lsc] [ftp://obelix.sps-pi.cz/n/janousek/mikroLAB/26_LOGO%21%20Siemens/12.06_navrh_KLO_LOGO.lld 12.06_navrh_KLO_LOGO.lld]
| | ==MIT vývoj aplikace s MCU == |
| # Realizujte [[schodišťové zapojení]] pro 2 a více vstupů, t.j. kterýmkoli přepínačem-vypínačem vypnout-zapnout [http://miroslavstiburek.kvalitne.cz/zapojeni%20vypinacu.doc lit].
| |
| # Navrhněte [[stykač]] pro ovládání osvětlení pomocí tlačítka ZAP a pomocí tlačítka VYP + další výstup, který ovládá blikající maják
| |
| # Navrhněte [[stykač]] s jedním spínaným vstupem, který aktivací sepne a následnou aktivací vypne atd.
| |
| # Realizujte [[časové relé]] pro jeden spínaný vstup, který aktivací sepne a po 20 sec. vypne. Každá aktivace vstupu dřív než 20 sec. výstup vypne.
| |
| # '''Pojezdová brána:''' jeden spínaný vstup, který aktivací sepne 1 výstup. Následně vstup výstup vypne, následně vstup sepne 2. výstup, následně vstup vše vypne atd.
| |
| # '''cv6.''' + doba sepnutého výstupu omezena na 20 sec.
| |
|
| |
|
| DÚ:
| | <!------- TABULKA - DESIGN -------> |
| | {| style="padding: 0px; width: 50%; margin-top: 4px;" |
| | | style="width: 50%; vertical-align: top;" | |
|
| |
|
| # '''Pojezdová brána:''' stejná funkce + časově omezené výstupy na 15 sec.
| | {{MIT Úlohy na cvičení}} |
| # Zpracovat PP podle vzoru
| |
|
| |
|
| </div></div>
| | |} |
|
| |
|
| <!------- MIT vývoj: ------->
| | ==Robotika s NXT== |
| <div style="border: 1px solid rgb(245, 223, 154); background-color: rgb(255, 254, 251); font-size: 90%;margin-bottom: 5px;">
| |
| <div style="border-style: solid; border-color: rgb(205, 183, 114); border-width: 0px 0px 1px; height: 16pt; background-color: rgb(245, 223, 154); font-weight: bolder; position: relative;">
| |
| <div style="position: absolute; top: 0pt; left: 0pt;"></div>
| |
| <div style="padding-left: 35px;">[[Vývoj MIT aplikace s 8051|MIT]] vývoj:</div></div>
| |
| <div style="margin: 0.5em; clear: both; font-size: 95%; padding-top: 0.5em;">
| |
| [[Soubor:250px-Vyvojovy_diagram_zarovka-1-.png|thumb]]
| |
| mikroprocesorové aplikace s MCU 8051 [http://www.mountfield.cz/cs/stranky/jak-pecovat-o-bazenovou-vodu/diagram.gif ukázka vývojvého diagramu]
| |
|
| |
| pro SP použít: [ftp://obelix.sps-pi.cz/n/janousek/mikroLAB/30_SES%20sestavy/Blokova%20schemata Blokova schemata] kresleno v programu [http://www.proficad.cz/ Proficad]
| |
|
| |
| '''Úkoly:'''
| |
|
| |
|
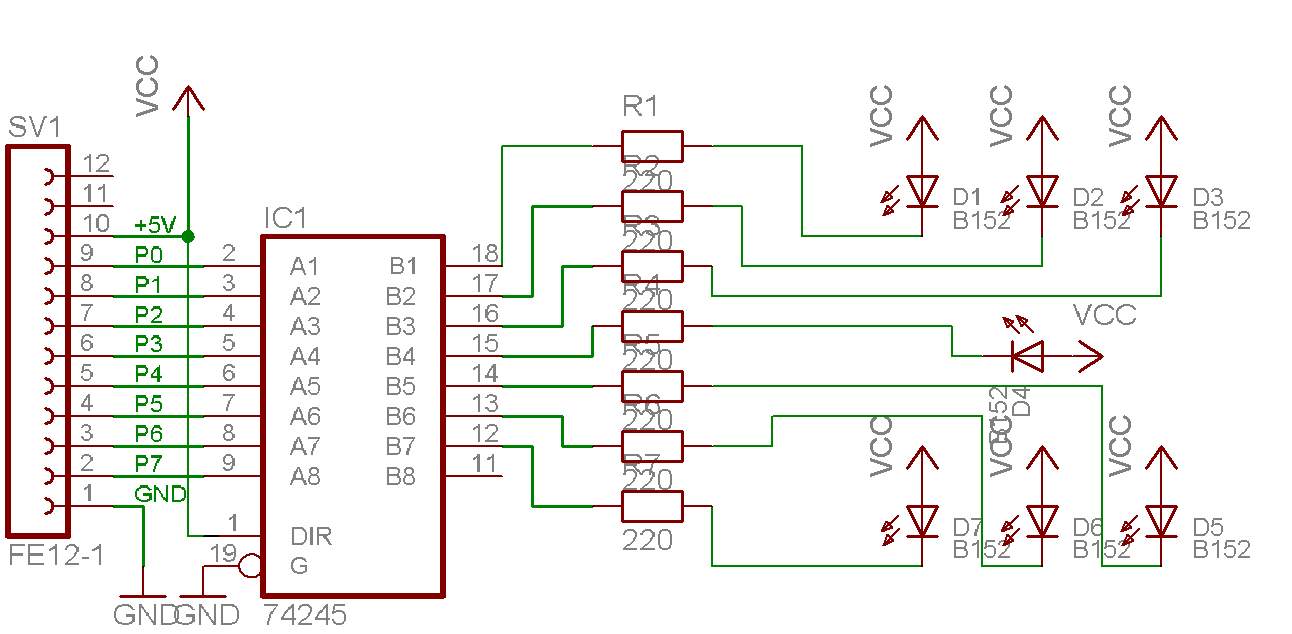
| # Připojte [http://wiki.sps-pi.com/images/7/70/Modul_LED.jpg OUT01 modul s LED] k [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/87_VYV%20Vyvojove%20sestavy/VYV01%20RD2%20vyvoj%20aplikaci%20s%208051/VYV01%20Popis%20vyvojove%20sestavy%20RD2Kit%20s%2089C51ED2.pdf vývojové sestavě RD2Kit] s 89C51ED2 a naprogramujte aplikaci pro ovládání modulu.
| | <!------- TABULKA - DESIGN -------> |
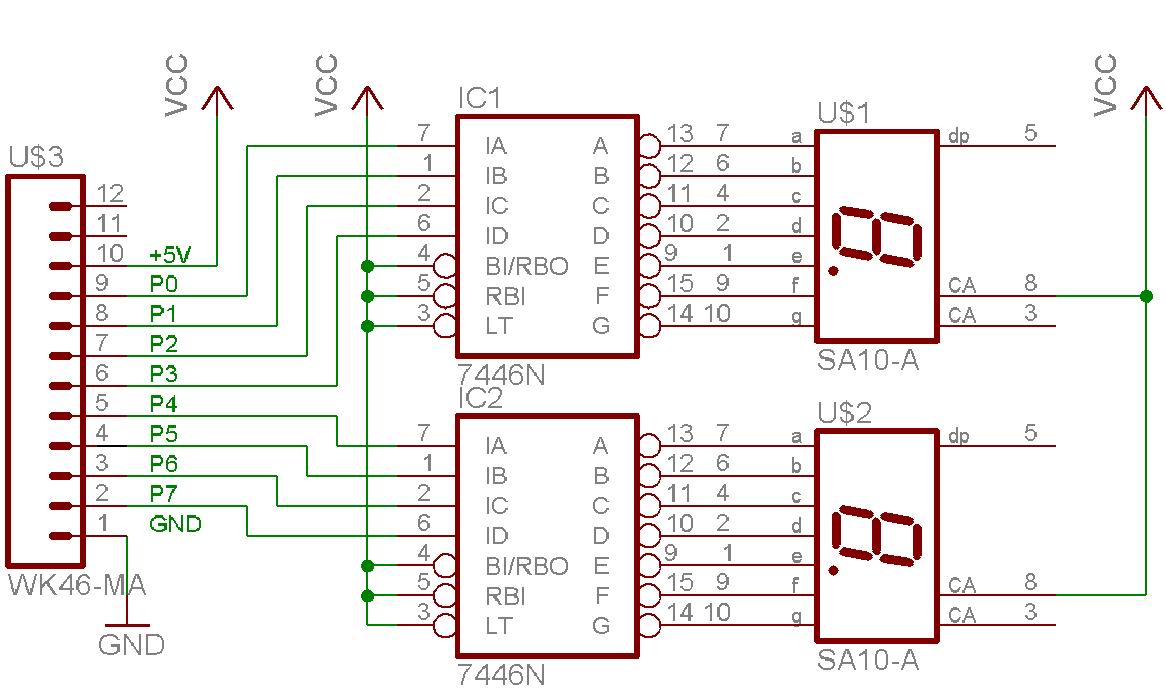
| # Připojte Soubor:[ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/28_OUT%20vystupni%20moduly/OUT02%20-%20dvoumistny%20display/OUT02%20dvoumistny%20display.pdf OUT02 dvoumistný display] k [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/87_VYV%20Vyvojove%20sestavy/VYV01%20RD2%20vyvoj%20aplikaci%20s%208051/VYV01%20Popis%20vyvojove%20sestavy%20RD2Kit%20s%2089C51ED2.pdf RD2Kit] a zprovozněte program pro postupné zobrazování 00 ....09, 10, 11, .........99,
| | {| style="padding: 0px; width: 50%; margin-top: 4px;" |
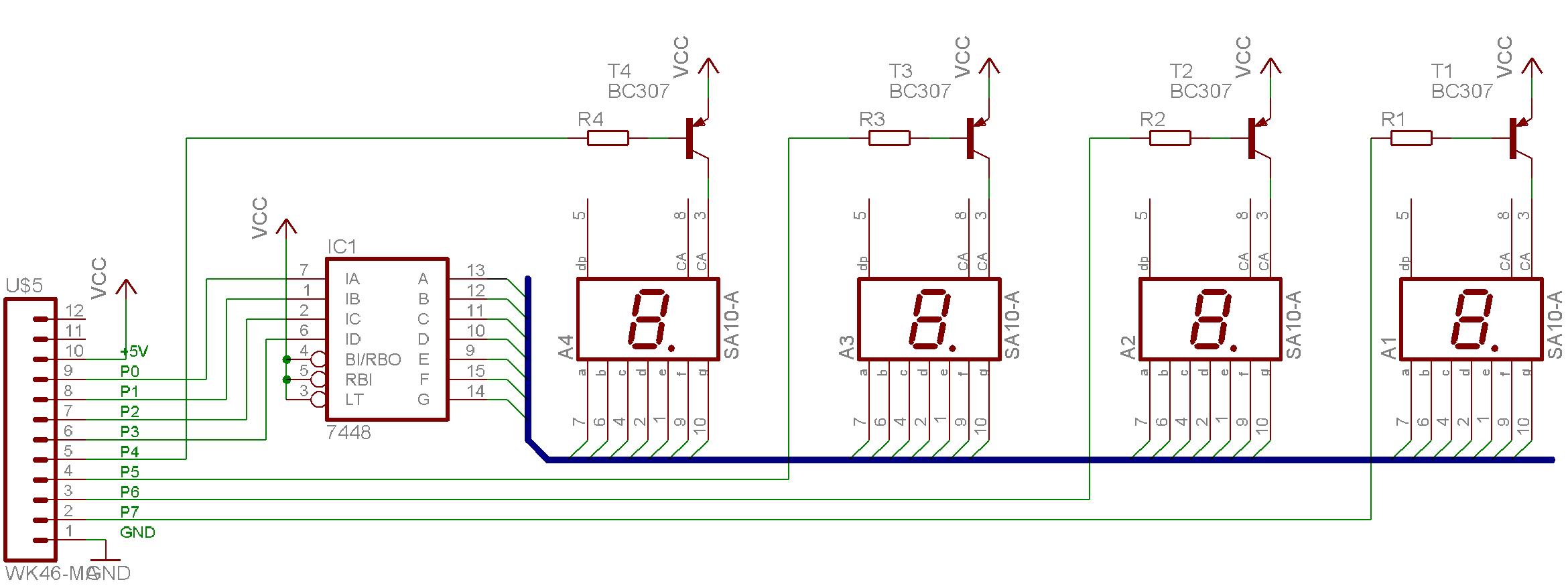
| # Připojte [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/28_OUT%20vystupni%20moduly/OUT03%20-%20disp%20MPX/sch.jpg OUT03 modul MPX] k [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/87_VYV%20Vyvojove%20sestavy/VYV01%20RD2%20vyvoj%20aplikaci%20s%208051/VYV01%20Popis%20vyvojove%20sestavy%20RD2Kit%20s%2089C51ED2.pdf RD2Kit] a zprovozněte program pro ovládání displeje
| | | style="width: 60%; vertical-align: top;" | |
| # [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/28_OUT%20vystupni%20moduly/OUT04%20-%20displ%20seriovy/Modul%20displeje%20se%20seriovym%20vstupem%20N102.pdf Modul displeje se seriovym vstupem N102] Připojte a ovládejte
| |
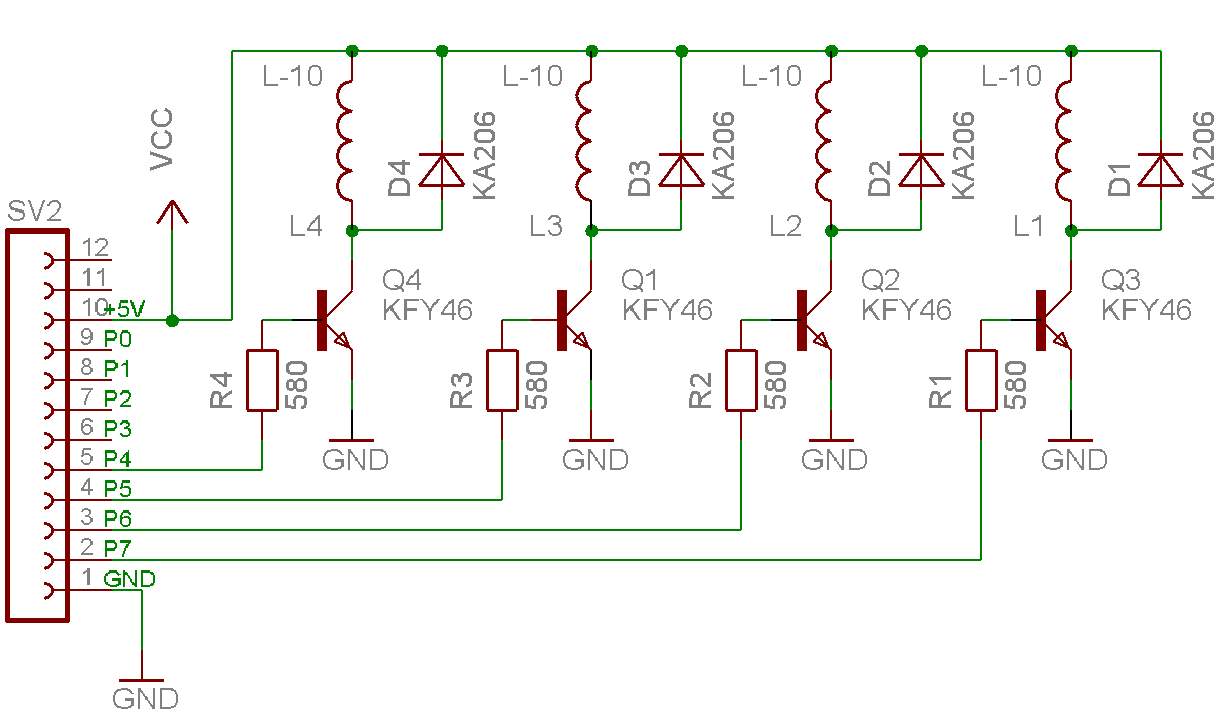
| # Ovládejte modul krokového motoru Soubor:[ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/28_OUT%20vystupni%20moduly/OUT06%20-%20modul%20krokoveho%20motoru/OUT06.jpg OUT06]
| |
| # Ovládejte modul stejnosměrného motoru [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/28_OUT%20vystupni%20moduly/OUT07%20-%20modul%20ss%20modulu/OUT07.jpg OUT07]
| |
| # Zprovozněte hrací kostku [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/28_OUT%20vystupni%20moduly/OUT09%20-%20modul%20LED%20kostky/OUT09.jpg OUT09]
| |
| # Zprovozněte '''křižovatku''' s MCU 8051 v sestavě vývojového kitu RD2 kit info: [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/30_SES%20sestavy/SES01%20Krizovatka SES01 Krizovatka]
| |
| # Naprogramujte MCU 8051 pro funkci '''jeřábu''' [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/30_SES%20sestavy/SES02%20Jerab SES02 Jerab] '''pračky''' [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/30_SES%20sestavy/SES03%20Pracka SES03 Pracka] '''plotru''' [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/30_SES%20sestavy/SES04%20Plotr%20-%20Souradnicovy%20zapisovac SES04 Plotr - Souradnicovy zapisovac] '''satelitního pozicionéru''' [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/30_SES%20sestavy/SES05%20Satelitni%20pozicioner SES05 Satelitni pozicioner]
| |
| # [http://obelix.sps-pi.cz/n/Janousek%5CmikroLAB%5C30_SES%20sestavy%5CSES18%20Citac%20s%202%20x%20SA%5Codpo%C4%8D%C3%ADtavadlo%20z%2060%20do%2000%5CSES18b%20Odpo%C4%8D%C3%ADt%C3%A1vadlo.doc SES18] Odpočítávadlo: Modifikujte program v modulu SES18 tak, aby se po zapnutí objevilo na displeji číslo 60 a po jedné sekundě se obsah snižoval. Při dosažení 00 se odpočet zastaví a na výstupu P1.0 se objeví log. 1 na dobu 30 sec
| |
|
| |
|
| doplňkové úlohy:
| | {{NXT Úlohy na cvičení}} |
|
| |
| * Otestujte SW [http://www.lancos.com/prog.html PonyProg] pro 89S2051 a 89S51
| |
| * Otestujte SW [http://hw.cz/constrc/lpt_isp_prog/ ISP_Prog] pro 89S2051 a 89S51
| |
|
| |
|
| </div></div>
| | |} |
| | |
| <!------- MIT realizace: ------->
| |
| <div style="border: 1px solid rgb(245, 223, 154); background-color: rgb(255, 254, 251); font-size: 90%; margin-bottom: 5px;">
| |
| <div style="border-style: solid; border-color: rgb(205, 183, 114); border-width: 0px 0px 1px; height: 16pt; background-color: rgb(245, 223, 154); font-weight: bolder; position: relative;">
| |
| <div style="position: absolute; top: 0pt; left: 0pt;"></div>
| |
| <div style="padding-left: 35px;">[[Zajímavá zapojení s MCU|MIT]] realizace u [[RR]]:</div></div>
| |
| <div style="margin: 0.5em; clear: both; font-size: 95%; padding-top: 0.5em;">
| |
| Přehled i zadávací formulář povinné práce u [[RR]] [[PRA_Povinné_práce|zde]]
| |
|
| |
|
| Pokud je práce pro školu, tak vyplňte [[Objednávky součástek na PP SOČ MP|objednávkový formulář]] na požadovaný materiál.
| | ==Robotika s BOB== |
|
| |
|
| Náměty s MCU naleznete [[Zajímavá zapojení s MCU|zde]]
| | <!------- TABULKA - DESIGN -------> |
| | | {| style="padding: 0px; width: 50%; margin-top: 4px;" |
| <html>
| | | style="width: 50%; vertical-align: top;" | |
| <iframe src="http://spreadsheets.google.com/pub?key=tmLrB4HM9rD9GUqwDJHi6zQ&output=html" width="350" height="200" frameborder="0" marginheight="0" marginwidth="0">Načítání...</iframe>
| |
| </html>
| |
| | |
| | |
| </div></div>
| |
| | |
| | <!------- DRUHÝ SLOUPEC ------->
| |
| | style="vertical-align: top;" | | |
| | |
| <!------- Robotika s [[NXT]]: ------->
| |
| <div style="border: 1px solid rgb(245, 223, 154); background-color: rgb(255, 254, 251); font-size: 90%; margin-bottom: 5px;">
| |
| <div style="border-style: solid; border-color: rgb(205, 183, 114); border-width: 0px 0px 1px; height: 16pt; background-color: rgb(245, 223, 154); font-weight: bolder; position: relative;">
| |
| <div style="position: absolute; top: 0pt; left: 0pt;"></div>
| |
| <div style="padding-left: 35px;">Robotika s [[NXT]]:</div></div>
| |
| <div style="margin: 0.5em; clear: both; font-size: 95%; padding-top: 0.5em;">
| |
| [[Soubor:nxt-2.jpg|thumb]]
| |
| | |
| # Sestavte robota [[NXT]]
| |
| # Napište program tak, aby se robot pohyboval vpřed, vzad, zatočil...
| |
| # Jel rovně a zastavil na 60 cm vzdáleném vhodném místě označeném černou lepící páskou.
| |
| # Jel rovně, otočit se a jel zpátky, jakmile bude stisknutý kontaktní senzor.
| |
| # Jel ve čtyřúhelníku a zastavil u počátečního bodu.
| |
| # Připojte čidlo dotyku a upravte program tak, aby se robot pohyboval dokud nenarazí na překážku.
| |
| # Modifikujte program pro čidlo ultrazvuku
| |
| # Připojte čidlo světla a naučte robota ject podél černé linky
| |
| # Start ve vzdálenosti 60 cm od černé linie. Robot najde dráhu a sleduje ji
| |
| # Naučte robota šplhat přes minimálně 2,5 cm tlustou knihu.
| |
| # Najde předmět, uchopí a přiveze
| |
| # Nakombinujte různá čidla pro pohyb robota
| |
| </div></div>
| |
|
| |
|
| <!------- Robotika s [[BOB]]: -------> | | <!------- Robotika s [[BOB]]: -------> |
| <div style="border: 1px solid rgb(245, 223, 154); background-color: rgb(255, 254, 251); font-size: 90%; margin-bottom: 5px;"> | | <div style="border: 1px solid rgb(245, 223, 154); background-color: rgb(255, 254, 251); font-size: 90%; margin-bottom: 5px;" > |
| <div style="border-style: solid; border-color: rgb(205, 183, 114); border-width: 0px 0px 1px; height: 16pt; background-color: rgb(245, 223, 154); font-weight: bolder; position: relative;"> | | <div style="border-style: solid; border-color: rgb(205, 183, 114); border-width: 0px 0px 1px; height: 16pt; background-color: rgb(245, 223, 154); font-weight: bolder; position: relative;"> |
| <div style="position: absolute; top: 0pt; left: 0pt;"></div> | | <div style="position: absolute; top: 0pt; left: 0pt;"></div> |
| <div style="padding-left: 35px;">Robotika s [[BOB]]:</div></div> | | <div style="padding-left: 35px;">Robotika s [[BOB]]:</div></div> |
| <div style="margin: 0.5em; clear: both; font-size: 95%; padding-top: 0.5em;"> | | <div style="margin: 0.5em; clear: both; font-size: 95%; padding-top: 0.5em;"> |
| Řádek 206: |
Řádek 214: |
|
| |
|
| Úkoly jsou zcela identické jako s robotem [[NXT]] ale tentkráte s robotem [[BOB]] | | Úkoly jsou zcela identické jako s robotem [[NXT]] ale tentkráte s robotem [[BOB]] |
| </div></div>
| |
|
| |
|
| <!------- Robotika s robotickou rukou [[ROR]] L601: -------> | | <br><br><br><br><br><br><br><br><br> |
| <div style="border: 1px solid rgb(245, 223, 154); background-color: rgb(255, 254, 251); font-size:90%; margin-bottom: 5px;"> | | |
| <div style="border-style: solid; border-color: rgb(205, 183, 114); border-width: 0px 0px 1px; height: 16pt; background-color: rgb(245, 223, 154); font-weight: bolder; position: relative;"> | |
| <div style="position: absolute; top: 0pt; left: 0pt;"></div> | |
| <div style="padding-left: 35px;">Robotika s robotickou rukou [[ROR]]:</div></div> | |
| <div style="margin: 0.5em; clear: both; font-size: 95%; padding-top: 0.5em;"> | |
| [[Soubor:Ruka.jpg|thumb]]
| |
| </div></div> | | </div></div> |
|
| |
|
| <!------- Robotika s robotem [[Ju-Ju]]: ------->
| |
| <div style="border: 1px solid rgb(245, 223, 154); background-color: rgb(255, 254, 251); font-size: 90%; margin-bottom: 5px;">
| |
| <div style="border-style: solid; border-color: rgb(205, 183, 114); border-width: 0px 0px 1px; height: 16pt; background-color: rgb(245, 223, 154); font-weight: bolder; position: relative;">
| |
| <div style="position: absolute; top: 0pt; left: 0pt;"></div>
| |
| <div style="padding-left: 35px;">Robotika s robotem [[Ju-Ju]]:</div></div>
| |
| <div style="margin: 0.5em; clear: both; font-size: 95%; padding-top: 0.5em;">
| |
| [[Soubor:JU_JU.jpg|thumb]]
| |
| </div></div>
| |
| |} | | |} |
|
| |
|
| == [ftp://obelix.sps-pi.cz/n/janousek/PRA-APLMIT/Seminarni%20prace Povinné práce:] ==
| |
|
| |
|
| Z každého úkolu je nutné zpracovat protokol = jakýsi záznam o vykonané činnosti. Výsledky si každý ukládá do svého, osobně vytvořeného adresáře v [ftp://obelix.sps-pi.cz/n/janousek/!Povinne_prace !Povinne_prace] ve formátu xz_Prijmeni_Jmenouúkol (xy = pořadové číslo v třídní knize) např. podle vzorů:
| |
|
| |
|
|
| |
|
| odevzdat:
| |
| * [[Image:Icon-pdf.gif]] [http://moo.sps-pi.cz/mod/assignment/view.php?id=353 1 - Vývoj aplikace s LOGO]
| |
| * [[Image:Icon-pdf.gif]] [http://moo.sps-pi.cz/mod/assignment/view.php?id=354 2 - Vývoj MIT aplikace]
| |
| * [[Image:Icon-pdf.gif]] [http://moo.sps-pi.cz/mod/assignment/view.php?id=675 3 - MIT realizace]
| |
| * [[Image:Icon-pdf.gif]] [http://moo.sps-pi.cz/mod/assignment/view.php?id=355 4 - Vývoj aplikace s robotem NXT]
| |
| * [[Image:Icon-pdf.gif]] [http://moo.sps-pi.cz/mod/assignment/view.php?id=365 5 - Vývoj aplikace s robotem BOB]
| |
|
| |
|
| | ---- |
| | ==Realizace povinné ročníkové práce s [[Zajímavá zapojení s MCU|MCU]]== |
|
| |
|
| | <!------- TABULKA - DESIGN -------> |
| | {| style="padding: 0px; width: 50%; margin-top: 4px;" |
| | | style="width: 50%; vertical-align: top;" | |
|
| |
|
| | <!------- MIT realizace: -------> |
| | <div style="border: 1px solid rgb(245, 223, 154); background-color: rgb(255, 254, 251); font-size: 90%; margin-bottom: 5px;" > |
| | <div style="border-style: solid; border-color: rgb(205, 183, 114); border-width: 0px 0px 1px; height: 16pt; background-color: rgb(245, 223, 154); font-weight: bolder; position: relative;"> |
| | <div style="position: absolute; top: 0pt; left: 0pt;"></div> |
| | <div style="padding-left: 35px;">[[Zajímavá zapojení s MCU|MIT]] realizace:</div></div> |
| | <div style="margin: 0.5em; clear: both; font-size: 95%; padding-top: 0.5em;"> |
| | Náměty [[Zajímavá zapojení s MCU|zde]]. |
| | |
| | Registrace [[PRA_Povinné_práce|zde]]. |
| | |
| | [[Objednávky součástek na PP SOČ MP|Objednávka součástek]] [[Soubor:E-shop_www.gif|50x51px|link=http://wiki.sps-pi.com/index.php/Objedn%C3%A1vky_sou%C4%8D%C3%A1stek_na_PP_SO%C4%8C_MP|e-shop]] |
|
| |
|
| | [[Soubor:GDPR.jpg|link=https://www.gdpr.cz/gdpr/]] |
|
| |
|
| archiv
| | </div></div> |
| | | |} |
| | |
| | |
| * [ftp://obelix.sps-pi.cz/n/janousek/!Povinne_prace/C4%2020xy-ab_VZOR/cd_Prijemeni_Jmeno/01_Prijmeni_Jmeno_Logo.doc 01_Prijmeni_Jmeno_Logo.doc]
| |
| | |
| * [ftp://obelix.sps-pi.cz/n/janousek/!Povinne_prace/C4%2020xy-ab_VZOR/cd_Prijemeni_Jmeno/02_Prijmeni_Jmeno_APLMIT.doc 02_Prijmeni_Jmeno_APLMIT.doc]
| |
| | |
| * [ftp://obelix.sps-pi.cz/n/janousek/!Povinne_prace/C4%2020xy-ab_VZOR/cd_Prijemeni_Jmeno/03_Prijmeni_Jmeno_NXT.doc 03_Prijmeni_Jmeno_NXT.doc]
| |
| | |
| * [ftp://obelix.sps-pi.cz/n/janousek/!Povinne_prace/C4%2020xy-ab_VZOR/cd_Prijemeni_Jmeno/04_Prijmeni_Jmeno_BOB.doc 04_Prijmeni_Jmeno_BOB.doc] ale vše novém [ftp://obelix.sps-pi.cz/n/janousek/!Povinne_prace/Trida_PoradoveCislo_Prijmeni_Jmeno_Nazev.doc FORMULÁŘI] z projektu [http://www.sps-pi.cz/opvk OP VK]:
| |
| | |
| [[Soubor:SP-odevzdani.jpg]]
| |
| | |
| | |
| * Vyvíjíme tyto konstrukce: *
| |
|
| |
|
| * např. nabídka z [http://old.sps-pi.cz/aplmit mikroprocesorových aplikací]
| | Přehled povinných prací předmětu [[PRA]] |
| * [http://www.8052.com/users/AT89S52InSystemProg/ Programátor MCU 89s51 přes COM] ATMEL AT89SXX ISP Flash Programmer v1.4
| |
| * [http://web.quick.cz/ruckl/biprog/biprog.html biprog na COM - nejen ISP programátor 89s2051, 89LP4052]
| |
| * [http://web.quick.cz/ruckl/biprog/biprog.html AVR - vynikající] [http://web.quick.cz/ruckl/biprog/components/biprog_usb-HW2_1.pdf biprog na USB]
| |
| * [http://www.obdev.at/products/avrusb/powerswitch.html PowerSwitch - zajímavá aplikace ovládající zařízení přes USB (s 2313 )připojená na USB]
| |
| * [http://www.cesko.host.sk/IgorPlugUSB_RS232/IgorPlug-USB%20(AVR)%20RS232.htm Vynikající USB-RS232 TTL převodník s Atmega8]
| |
| * [http://www.volny.cz/fuksam/navrhy/zobrazovace/zobrazovace.htm Přípravky pro výuku základů řízení zobrazovacích prvků s 8051]
| |
|
| |
|
| | [[Soubor:GDPR.jpg|link=https://www.gdpr.cz/gdpr/]] |
|
| |
|
| [[Category:PRA]] | | [[Category:PRA]] |
| [[Category:Předměty]] | | [[Category:Předměty]] |















 8051 s LED a DIP
8051 s LED a DIP Křižovatka
Křižovatka Pračka
Pračka


 Blik
Blik DICE
DICE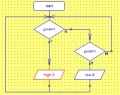 2x IN, 2 x OUT
2x IN, 2 x OUT



 Multisim - simulace el. obvodu
Multisim - simulace el. obvodu





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
