NAG-IoE: Porovnání verzí
Bez shrnutí editace |
|||
| Řádek 63: | Řádek 63: | ||
[[Soubor:NAGIoE-2016-mapa-tymu.png|300px|link=https://1379281.netacad.com/courses/282734/pages/mapa|Mapa týmů]] | [[Soubor:NAGIoE-2016-mapa-tymu.png|300px|link=https://1379281.netacad.com/courses/282734/pages/mapa|Mapa týmů]] | ||
=== Zadání === | === Zadání === | ||
[[Soubor:Pdf.gif]] [https://1379281.netacad.com/courses/282734/files/19398836/download 1. kolo - zadání] | [[Soubor:Pdf.gif]] [https://1379281.netacad.com/courses/282734/files/19398836/download 1. kolo - zadání] | ||
[[Soubor:Pdf.gif]] [https://1379281.netacad.com/courses/282734/files/20124654/download 2. kolo - zadání] | [[Soubor:Pdf.gif]] [https://1379281.netacad.com/courses/282734/files/20124654/download 2. kolo - zadání] | ||
[[Soubor:Pdf.gif]] [https://1379281.netacad.com/courses/282734/files/20659993/download 3. kolo - zadání] | |||
řešení: [https://ioe.zcu.cz/map/ mapa] | |||
Verze z 25. 1. 2016, 13:41
| Raspberry Pi | |
|
Pomůcky:
| |









Základní informace o soutěži
Jedná se o novou kategorii s možností hlavní výhry 20.000,- Kč. Název této nové kategorie je NAG-IoE (Networking Academy Games - Internet of Everything) v již 11. ročníku soutěže NAG. Tato nová kategorie je zaměřena na nejnovější trend v počítačovém světě a to Internet všech věcí. Jedná se o podporu a zatraktivnění výuky pro studenty zaměřené nejen na počítačové sítě ale i obecněji na základy elektroniky a operační systém Linux.
Více: http://www.netacad-games.cz/ioe
- 6 kol soutěže. Start 1.11.2015
- každý tým vytvoří video představující tým, dále pak videa a PDF v každém kole soutěže
- nejlepší tým v daném kole může získat další zajímavý rozšiřující HW
- bonusové body za celoroční projekt (bez zadání, téma i obsah dle uvážení týmu)
- 19.3.2016 Cisco Praha
1. tým

Zadání
řešení: mapa
Introduction
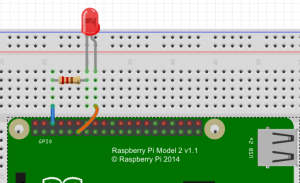
Raspberry gPIo

Wiring Pi
Blink
#include <wiringPi.h>
int main (void)
{
wiringPiSetup () ;
pinMode (0, OUTPUT) ;
for (;;)
{
digitalWrite (0, HIGH) ; delay (500) ;
digitalWrite (0, LOW) ; delay (500) ;
}
return 0 ;
}To compile and run:
gcc -Wall -o blink blink.c -lwiringPi sudo ./blink
Set up the ports

How to use WiringPi2 for Python on the Raspberry Pi in Raspbian part 1
# GPIO port numbers
import wiringpi2 as wiringpi
wiringpi.wiringPiSetupGpio()
wiringpi.pinMode(25, 0) # sets GPIO 25 to input
wiringpi.pinMode(24, 1) # sets GPIO 24 to output
wiringpi.pinMode(18, 2) # sets GPIO 18 to PWM mode
# wiringpi numbers
import wiringpi2 as wiringpi
wiringpi.wiringPiSetup()
wiringpi.pinMode(6, 0) # sets WP pin 6 to input
wiringpi.pinMode(5, 1) # sets WP pin 5 to output
wiringpi.pinMode(1, 2) # sets WP pin 1 to PWM mode
# Physical P1 header pin numbers
import wiringpi2 as wiringpi
wiringPiSetupPhys()
wiringpi.pinMode(22, 0) # sets P1 pin 22 to input
wiringpi.pinMode(18, 1) # sets P1 pin 18 to output
wiringpi.pinMode(12, 2) # sets P1 pin 12 to PWM modeRaspberry Pi with 7-segment display

Python
https://pypi.python.org/pypi/RPi.GPIO
/opt/nagioe/python_demo/blink.py /opt/nagioe/python_demo/push.py
blink.py
import RPi.GPIO as GPIO
import time
# blinking function
def blink(pin):
GPIO.output(pin,GPIO.HIGH)
time.sleep(1)
GPIO.output(pin,GPIO.LOW)
time.sleep(1)
return
# to use Raspberry Pi board pin numbers
GPIO.setmode(GPIO.BOARD)
GPIO.setwarnings(False)
# set up GPIO output channel
GPIO.setup(11, GPIO.OUT)
# blink GPIO17 50 times
for i in range(0,50):
blink(11)
GPIO.cleanup()push.py
import RPi.GPIO as GPIO
import time
print GPIO.RPI_REVISION
print GPIO.VERSION
GPIO.setmode(GPIO.BOARD)
pin=40
GPIO.setup(pin, GPIO.IN)
GPIO.setup(pin, GPIO.IN, pull_up_down=GPIO.PUD_UP)
while (1):
print GPIO.input(pin)
time.sleep(0.5)
#GPIO.output(pin, False)
GPIO.cleanup()Control LED
import RPi.GPIO as GPIO
import time
# blinking function
def blink(pin, pin2):
GPIO.output(pin,GPIO.HIGH)
time.sleep(0.1)
GPIO.output(pin,GPIO.LOW)
time.sleep(0.1)
GPIO.output(pin2,GPIO.HIGH)
time.sleep(0.1)
GPIO.output(pin2,GPIO.LOW)
time.sleep(0.1)
return
# to use Raspberry Pi board pin numbers
GPIO.setmode(GPIO.BOARD)
GPIO.setwarnings(False)
# set up GPIO output channel
GPIO.setup(11, GPIO.OUT)
GPIO.setup(13, GPIO.OUT)
GPIO.setup(40, GPIO.IN, pull_up_down=GPIO.PUD_UP)
blink(11, 13)
while (1):
if GPIO.input(40) == 0:
blink(11, 13)
time.sleep(0.1)
GPIO.cleanup()Turn LED
source: http://engr.uconn.edu/~song/classes/nes/RPi.pdf
import RPi.GPIO as GPIO
import time
def main():
GPIO.cleanup()
GPIO.setmode(GPIO.BOARD) # to use Raspberry Pi board pin numbers
GPIO.setup(11, GPIO.OUT) # set up GPIO output channel
while True:
GPIO.output(11, GPIO.LOW) # set RPi board pin 11 low. Turn off LED.
time.sleep(1)
GPIO.output(11, GPIO.HIGH) # set RPi board pin 11 high. Turn on LED.
time.sleep(2)
main()RaspBian
Username: pi, password: NAGIoE2015
Re-mapping Keyboard: XKBLAYOUT=”gb” Change “gb” to “us”
sudo vi /etc/default/keyboard
Start the desktop by typing: (http://engr.uconn.edu/~song/classes/nes/RPi.pdf)
startx
Booting your Raspberry Pi for the first time
sudo raspi-config
Update apt-get package index files:
sudo apt-get update
Install SSH:
sudo apt-get install ssh
Start SSH server:
sudo /etc/init.d/ssh start
To start the SSH server every time the Pi boots up:
sudo update-rc.d ssh defaults
How To Autostart Apps In Rasbian LXDE Desktop
sudo nano /etc/xdg/lxsession/LXDE-pi/autostart
Auto-run Python Scripts
@/usr/bin/python /home/pi/example.py
www
http://www.netacad-games.cz/nag-ioe-workshop
http://engr.uconn.edu/~song/classes/nes/RPi.pdf
Seznam týmů
- Střední odborná škola a Střední odborné učiliště, Hořovice
- SPŠ a VOŠ, Písek
- Stredni prumyslova skola elektrotechniky a informatiky, Ostrava (A)
- Stredni prumyslova skola elektrotechniky a informatiky, Ostrava (B)
- Střední školy informačních technologií, Frýdek - Místek
- SPŠ a OA, Bruntál
- Střední průmyslová škola, Přerov (A)
- Střední průmyslová škola, Přerov (B)
- SŠINFIS, Plzeň (A)
- SŠINFIS, Plzeň (B)
- VOŠ a SPŠ, Jičín
- Střední průmyslová škola, Trutnov
- SŠ a VOŠ aplikované kybernetiky, Hradec Králové (A)
- SŠ a VOŠ aplikované kybernetiky ,Hradec Králové (B)
- Střední škola informatiky, poštovnictví a finančnictví, Brno (A)
- Střední škola informatiky, poštovnictví a finančnictví, Brno (B)
- Obchodní akademie, Vyšší odborná škola a jazyková škola, Uherské Hradiště (A)
- Obchodní akademie, Vyšší odborná škola a jazyková škola, Uherské Hradiště (B)
- VOŠ a SPŠ, Šumperk
- Střední průmyslová škola elektrotechnická, Praha 10 (A)
- Střední průmyslová škola elektrotechnická, Praha 10 (B)
- VOŠ a SPŠE, Plzeň
- GaSOS, Rokycany