AplTVY3: Porovnání verzí
Skočit na navigaci
Skočit na vyhledávání
Bez shrnutí editace |
|||
| Řádek 118: | Řádek 118: | ||
Soubor:Umik-blok-schema.png|[[Umík]] - blokové schéma | Soubor:Umik-blok-schema.png|[[Umík]] - blokové schéma | ||
Soubor:Umik-popis.png|[[Umík]] - popis | Soubor:Umik-popis.png|[[Umík]] - popis | ||
</Gallery> | |||
== Témata na cvičení do roku 2016 == | == Témata na cvičení do roku 2016 == | ||
Verze z 27. 11. 2017, 12:14

| TP od roku 2016 | |
| |
| TP do roku 2016 | |
| |
| AplTVY3 | |
| {{#TwitterFBLike:|small}} | |
|
Navazuje na výuku: |
|
|
Výuka: |
v učebně D07 2 hodiny týdně a směřuje k úspěchům v SOČ a přípravou na Maturitní práce |
| Vývoj | mikroprocesorových aplikací |
| Robotika: | Vývoj aplikace s robotem (či realizace nového) NXT (NXT-G, BricxCC, Robot C) BOB s robotickou rukou L601 ROR robotem Ju-Ju |
| Povinná práce: |
Odevzdání do: příslušného adresáře zde |
| Úkoly: | |
| Užitečné odkazy: | |
| SW: |
|

Témata na cvičení od roku 2016
-
 PIC85 2 digit Up/Down Counter
PIC85 2 digit Up/Down Counter -
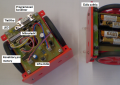
 PICAXE - vývojová deska
PICAXE - vývojová deska -
 PICAXE - vývojový diagram
PICAXE - vývojový diagram -
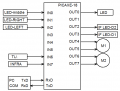
 PICAXE - blokové schéma
PICAXE - blokové schéma -
 Umík - blokové schéma
Umík - blokové schéma -
 Umík - popis
Umík - popis





Témata na cvičení do roku 2016
ELE:
-

-
 Stabilizovaný zdroj +5V
Stabilizovaný zdroj +5V -




MIT:




Bonus:
-

-

-

-
PIC85 2 digit Up/Down Counter
-

-

-

-

-
 Robot 2WD (arduino)
Robot 2WD (arduino) -
 Tank DO (arduino)
Tank DO (arduino) -
 Car DO (arduino)
Car DO (arduino)










-
PICAXE - vývojová deska
-
PICAXE - vývojový diagram
-
PICAXE - blokové schéma
-
Umík - blokové schéma
-
Umík - popis
Literatura

White Board








Otázky k opakování od roku 2016
Otázky k opakování do roku 2016
HW
- Navrhněte napájecí zdroj pro napájení mikroprocesorové aplikace
- Otestuje AKO s časovačem 555
- Popište funkci operačního zesilovače
- Proveďte návrh schéma zapojení s blikající LED (klasické řešení versus mikroprocesorové)
- Navrhněte připojení 7segmentovky k MCU
SW
- Napište program pro blikání jedné (a více) LED
- Připojte a otestujte čidlo dotyku (vzdálenosti, světla) s MCU
- Napište program pro test funkčnosti čidla světla
- Navrhněte a otestujte aplikaci ovládající motor (stejnosměrný, krokový)
- Popište postup vývoje mikroprocesorové aplikace
Inspirace