# HW: Nakreslete minimální schéma MIT aplikace s MCU, ke které bude připojena jedna vstupní periferie a dvě výstupní (výběr dle vlastního uvážení). Včetně vyřešeného zdroje pro napájení MCU. K dispozici zdroj nestabilizováného stejnosměrného napětí +9 až 12 V a součástky dle vlastního výběru.
# SW: Napište program pro řízení LED, která bude blikat s cca frekvencí 1Hz jen při aktivovaném tlačítku
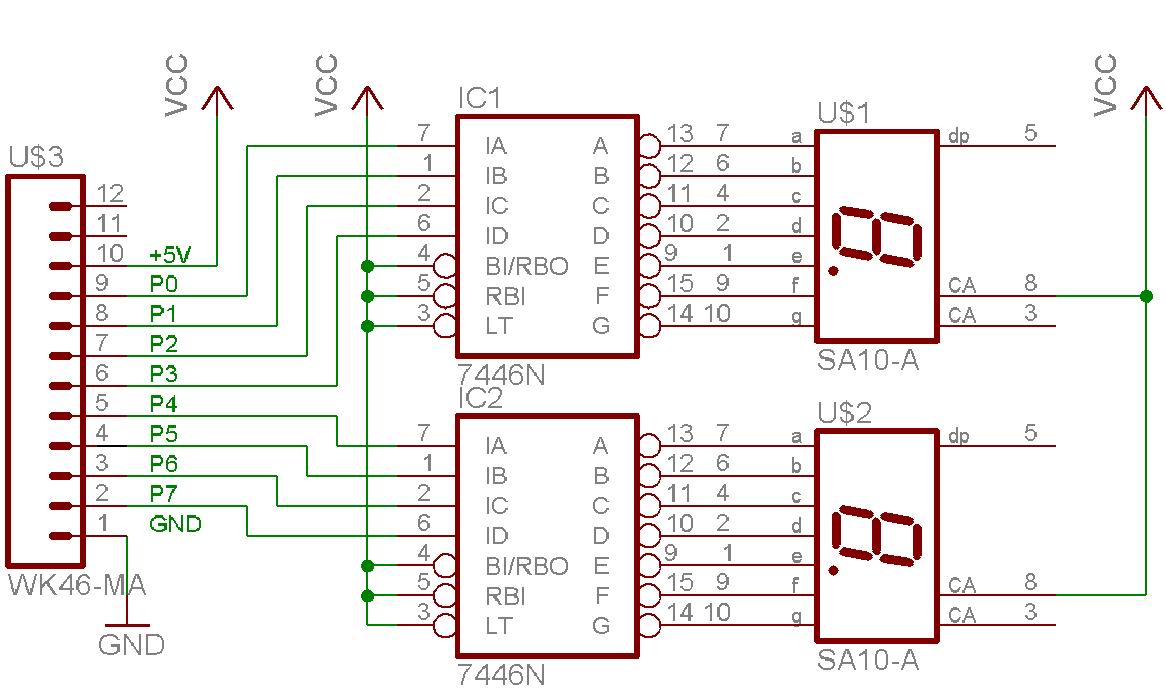
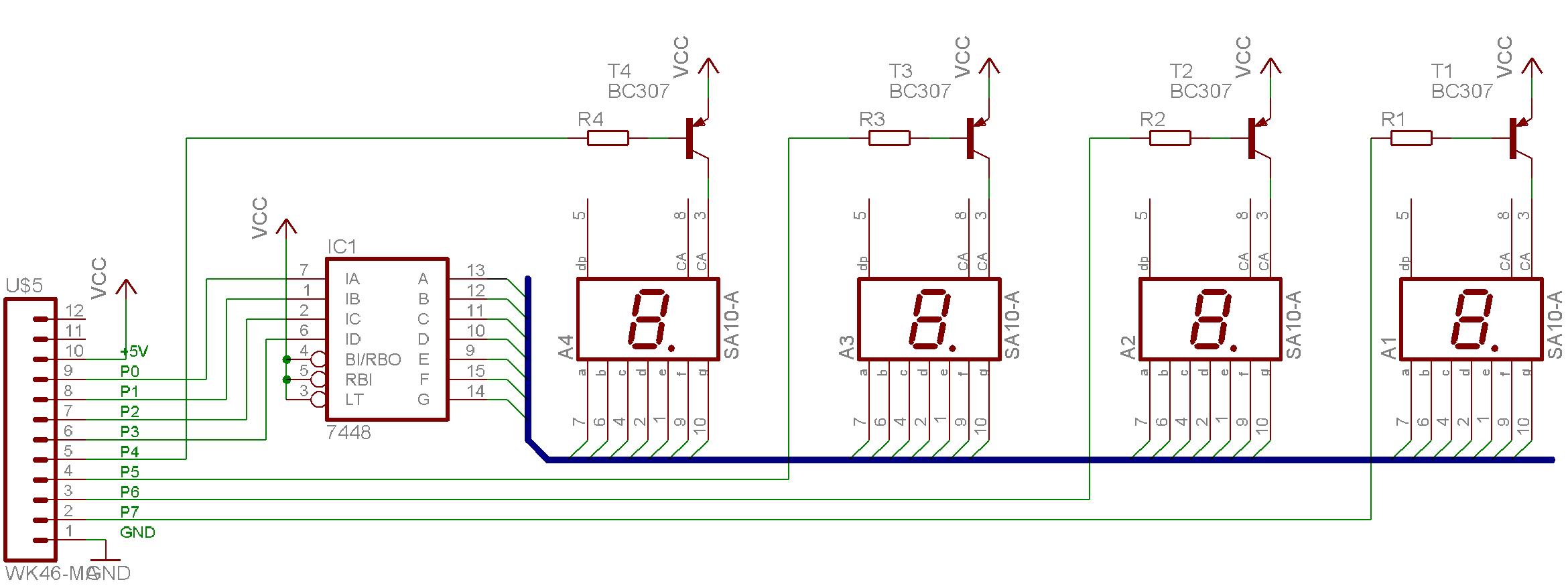
# HW: Nakreslete schéma 7segmentového displeje připojeného k MCU
# SW: Napište program, u kterého se vždy po aktivaci tlačítka změní stav na displeji o jedničku větší (0, 1, 2, 3, 4, 5 a zase od začátku)
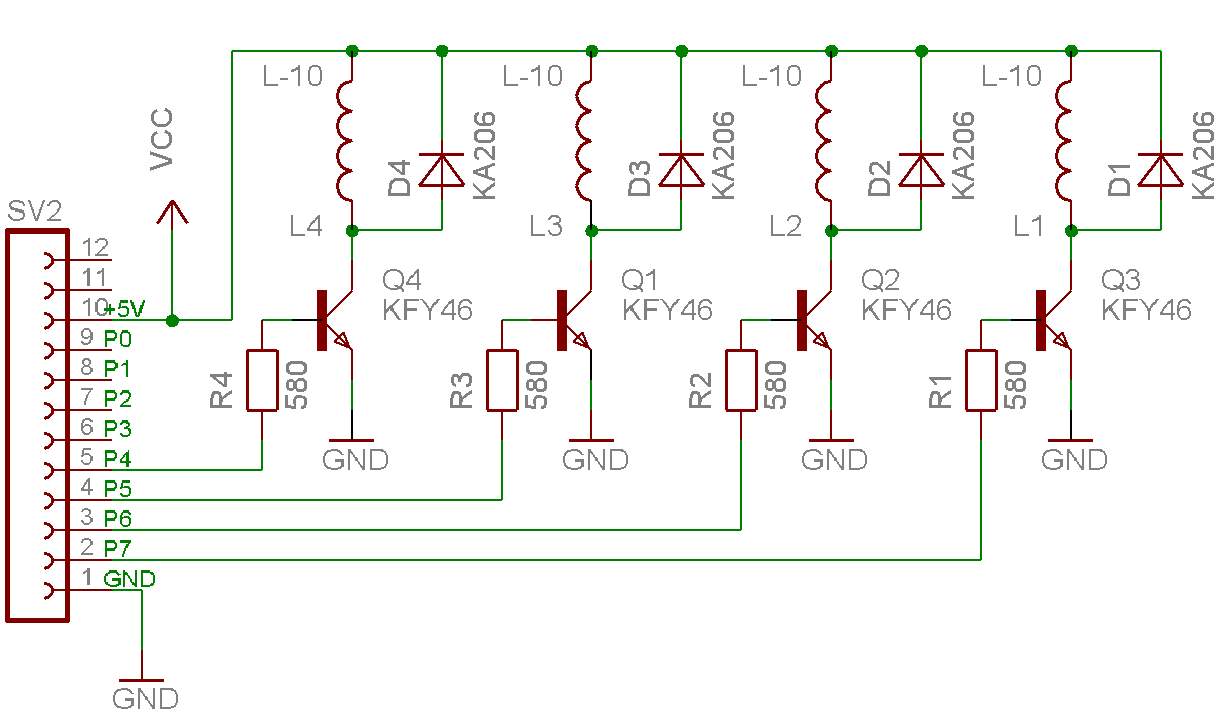
# HW: Nakreslete schéma zapojení krokového motoru k MCU
# SW: Napište program, pro krokový motor, který se bude cca 10 sekund točit jedním směrem a dalších 10 sekund opačným.
T0 - BOZP – řády odborných učeben
T1 - Vývoj MIT aplikace s UNI deskou
T2 - Realizace mikroprocesorové sestavy
T3 - Programování světelné křižovatky
T4 - Programování aplikace automatické pračky
T5 - Zpracování povinné práce
T6 - Návrh a editace el. schéma a DPS s prvky SMD
T7 - SMT – význam a výhody, pájení
T8 - Zpracování povinné práce
T9 - Vývoj aplikace s robotem – zadání úloh 1
T10 - Vývoj aplikace s robotem – zadání úloh 2
T11 - Vývoj aplikace s robotem – zadání úloh 3
T12 - Zpracování povinné práce
T13 - Opakování k maturitě
Domácí úkoly 2020
T9 - Vývoj aplikace s robotem – zadání úloh 1
V IDE (MCU8051IDE, TinkerCad) navrhněte a otestujte zapojení s mikroprocesorem, který bude ovládat 2 motory (robota), který bude jezdit 30 vteřin nestále do čtverce o straně 50 cm. Každý úspěšný experiment zpracujte v postupně rozšiřující dokumentaci. Tu zde odevzdejte jako součást textu.
nejlepší řešení:
V IDE (MCU8051IDE, TinkerCad) navrhněte a otestujte zapojení s mikroprocesorem, který bude ovládat 2 motory (robota). Robot bude obsahovat čidlo překážky (dotyku apod.) Pokud robot při jízdě narazí na překážku, couvne, otočí o o 120°st. a rozjede se znovu vpřed. Opět platí, že každý úspěšný experiment zpracujete v postupně rozšiřující dokumentaci a tu zde odevzdejte.
V IDE (MCU8051IDE, TinkerCad) navrhněte a otestujte zapojení s mikroprocesorem, který bude ovládat 2 motory (robota). Robot pojede čáře.
Napište program dle zadání v příloze
T10 - Vývoj aplikace s robotem – zadání úloh 2
T11 - Vývoj aplikace s robotem – zadání úloh 3
T12 - Zpracování povinné práce
T13 - Opakování k maturitě
Pozn.: Dokumentace se odevzdává elektroniky nejpozději do začátku následujícího vyučovacího cyklu. Při neodevzdání je práce hodnocena známkou nedostatečně.
Klasifikace:
průběžně na základě praktických výsledků v hodině
deník po každém úkolu
plnění dílčích úkolů při realizaci povinné ročníkové práce
Navrhnout Shield pro Arduino. Shield bude obsahovat LCD display + konektory pro připojení čidel teploty 18B20.Předloha (stáhnout a pak spustit v Eagle)
Zameškané cvičení je možné nahradit v předem domluveném čase, pravděpodobně v ÚT do 17:00 či ve ST do 18:00, popř. se dle domluvy "nahradí" formou zpracování některého úkolu z výše uvedených.
modul dvoumístné zobrazovací jednotky, kterou lze řídit maximálně 6 informačními vodiči.
modul dvoumístné zobrazovací jednotky, kterou lze řídit maximálně 2 informačními vodiči (GND a Vcc se nepočítá).
modul stejnosměrného motoru pro ovládání točí doleva/ doprava /netočí
výstupní modul akustické signalizace jež bude obsahovat telefonní sluchátko, který bude vydávat zvuk pouze v případě, kdy na řídící vstup bude přivedna logická jednička.
modul umožňující převod teplota – frekvenci, případně teplota – střída
čidlo teploty, které na výstupu změní logickou úroveň z “0” do “1” při zmenšení teploty pod nastavenou mez (např 20°)
čidlo světla, které na výstupu změní logickou úroveň z “0” do “1” při zvětšení osvětlení nad nastavenou mez.
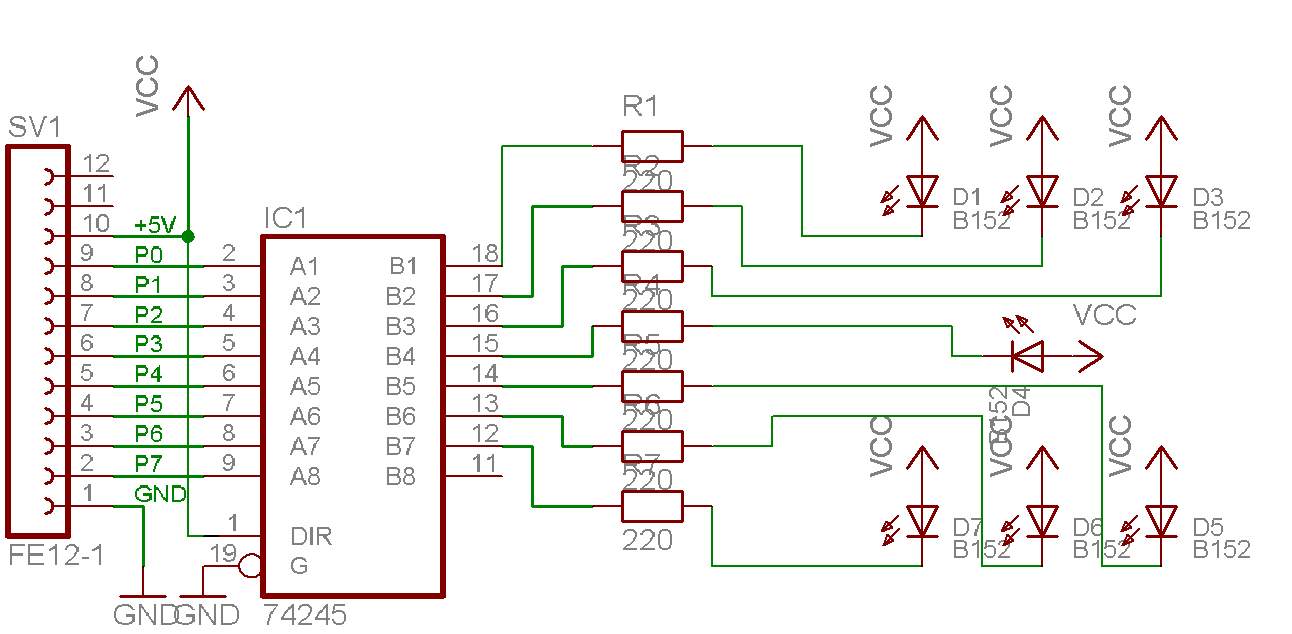
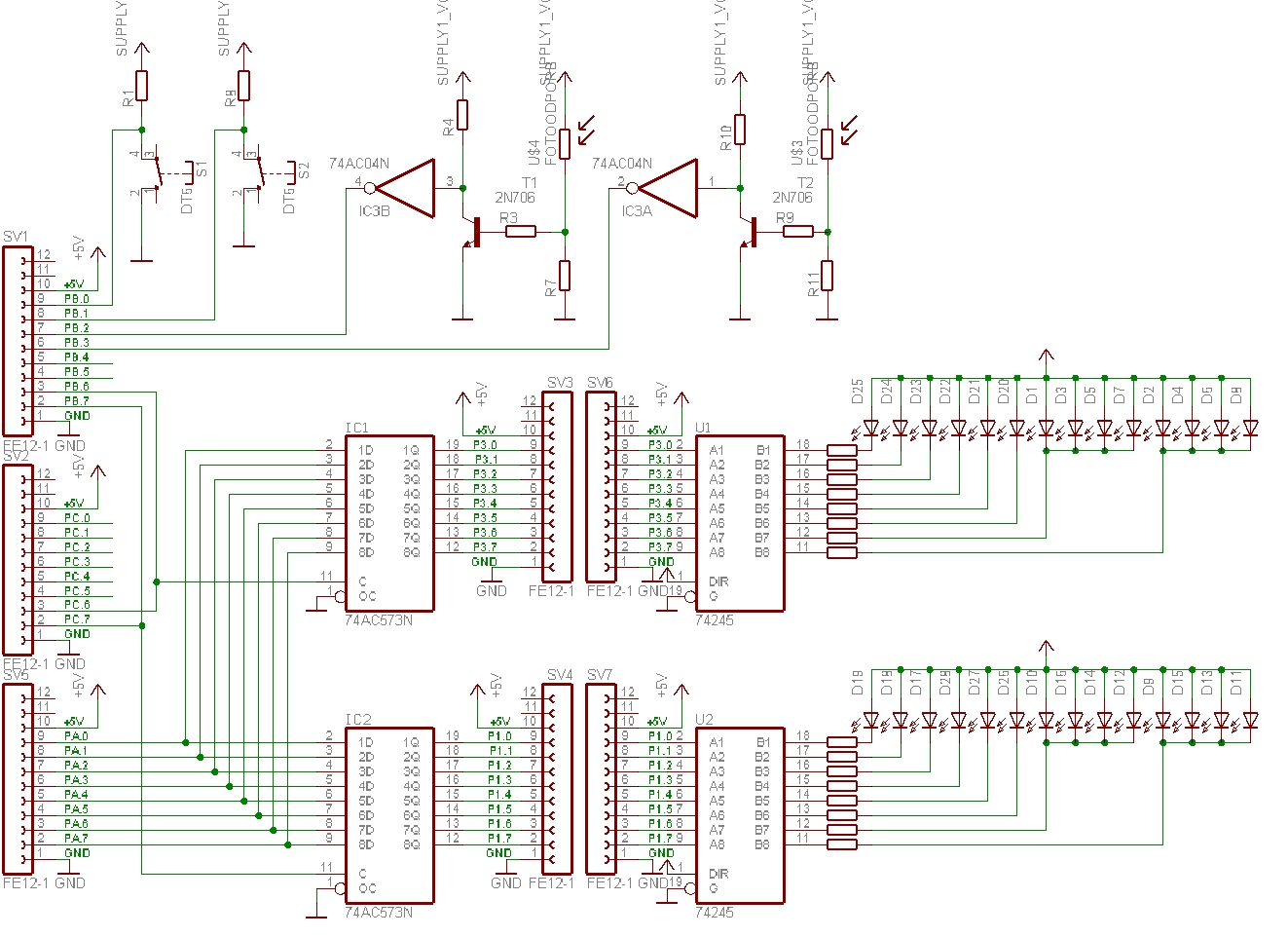
interface pomocí jehož lze rozšířit osmibitovou výstupní bránu na šestnástibitovou (např. pro řízení světelné křížovatky potřebují k řízení 16 signálů a máme k dispozici pouze 10.
připojení automatické pračky s výstupy pro napouštění vody, čerpadlo, ohřev, prací buben a vstupy, kde se hlídá minimální hladina vody, maximální hladina vody a dosažená teplota
i/o obvody umožňující připojit výkonové obvody (světelné blinkry, siréna, dveřní kontakty apod.) k mikroprocesoru
Úkol č.2 Proveďte návrh blokové schéma pro modul ze zadání
ovládání 7segmentového displaye ovládaného s libovolné mikroprocesorové aplikace
krokový motůrek řízený MCU. Proveďte otáčení motůrku jedním směrem. Proveďte změnu směru otáčení v závislosti na sepnutí tlačítka.
modul hrací kostky s MCU. Na kostce budou zobrazovány všechny hrací varianty v závislosti na zadání vstupní informace z modulu spínačů IN01.
jeřáb. Proveďte otáčení jeřábu jedním i druhým tlačítkem.
automatickou pračku řízenou pomocí MCU.
poplašné zařízení řízené MCU. Předveďte činnost ALARMU tak, aby po zapnutí napájení LED svítila 5 s (doba imunity) a po té začala LED blikat (ALARM hlídá). V případě zmáčknutí tlačitka je vyvolán akustický poplach. Celý děj se znovu opakuje.
počítadlo impulsů. Display + některé ze vstupních modulů či čidel
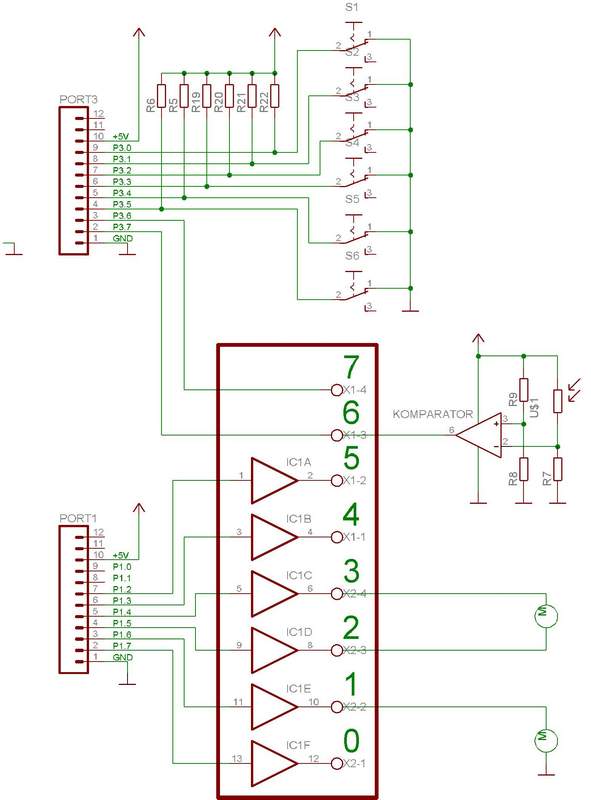
robota NXT (BOB) pohybující se podle černé linky.
robota NXT (BOB) pohybující se v bludišti od startu k cíli.
robota NXT (BOB) pohybující se vpřed dokud se nepřiblíží k překážce na vzdálenost 20cm. Pak se zastaví, otočí se cca o 160° a opět pokračuje vpřed. Celý cyklus se opakuje.
Úkol č.2 Vyberte dle zadání vhodné komponenty
Úkol č.3 Nakreslete vývojový diagram
Úkol č.4 Napište program v vhodném vývojovém prostředí
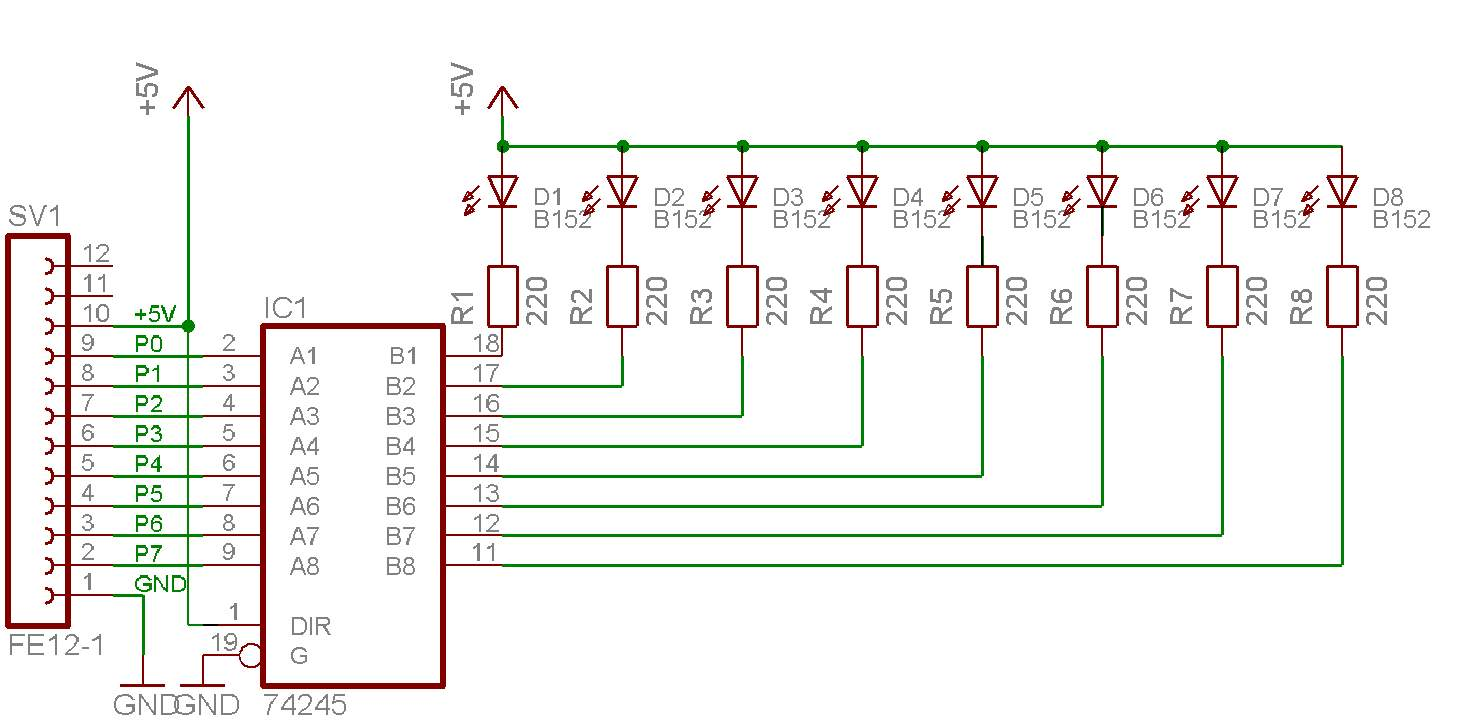
HW: Nakreslete minimální schéma MIT aplikace s MCU, ke které bude připojena jedna vstupní periferie a dvě výstupní (výběr dle vlastního uvážení). Včetně vyřešeného zdroje pro napájení MCU. K dispozici zdroj nestabilizováného stejnosměrného napětí +9 až 12 V a součástky dle vlastního výběru.
SW: Napište program pro řízení LED, která bude blikat s cca frekvencí 1Hz jen při aktivovaném tlačítku
HW: Nakreslete schéma 7segmentového displeje připojeného k MCU
SW: Napište program, u kterého se vždy po aktivaci tlačítka změní stav na displeji o jedničku větší (0, 1, 2, 3, 4, 5 a zase od začátku)
HW: Nakreslete schéma zapojení krokového motoru k MCU
SW: Napište program, pro krokový motor, který se bude cca 10 sekund točit jedním směrem a dalších 10 sekund opačným.
Realizujte schodišťové zapojení pro 2 a více vstupů, t.j. kterýmkoli přepínačem-vypínačem vypnout-zapnout lit.
Navrhněte stykač pro ovládání osvětlení pomocí tlačítka ZAP a pomocí tlačítka VYP + další výstup, který ovládá blikající maják
Navrhněte stykač s jedním spínaným vstupem, který aktivací sepne a následnou aktivací vypne atd.
Realizujte časové relé pro jeden spínaný vstup, který aktivací sepne a po 20 sec. vypne. Každá aktivace vstupu dřív než 20 sec. výstup vypne.
Pojezdová brána: jeden spínaný vstup, který aktivací sepne 1 výstup. Následně vstup výstup vypne, následně vstup sepne 2. výstup, následně vstup vše vypne atd.
cv6. + doba sepnutého výstupu omezena na 20 sec.
DÚ:
Pojezdová brána: stejná funkce + časově omezené výstupy na 15 sec.
Naprogramujte odpočítávadlo. Program modifikujte v modulu SES18 tak, aby se po zapnutí objevilo na displeji číslo 60 a po jedné sekundě se obsah snižoval. Při dosažení 00 se odpočet zastaví a na výstupu P1.0 se objeví log. 1 na dobu 30 sec. info na síti















 8051 s LED a DIP
8051 s LED a DIP Křižovatka
Křižovatka Pračka
Pračka


 Blik
Blik DICE
DICE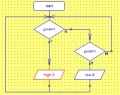 2x IN, 2 x OUT
2x IN, 2 x OUT

 Multisim - simulace el. obvodu
Multisim - simulace el. obvodu





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
