|
|
| Řádka 80: |
Řádka 80: |
| | | style="width: 50%; vertical-align: top;" | | | | style="width: 50%; vertical-align: top;" | |
| | | | |
| − | <!------- MIT vývoj: ------->
| + | {{MIT Úlohy na cvičení}} |
| − | <div style="border: 1px solid rgb(245, 223, 154); background-color: rgb(255, 254, 251); font-size: 90%; margin-bottom: 5px;" >
| + | |
| − | <div style="border-style: solid; border-color: rgb(205, 183, 114); border-width: 0px 0px 1px; height: 16pt; background-color: rgb(245, 223, 154); font-weight: bolder; position: relative;">
| + | |
| − | <div style="position: absolute; top: 0pt; left: 0pt;"></div>
| + | |
| − | <div style="padding-left: 35px;">[[Vývoj MIT aplikace s 8051|MIT]] vývoj:</div></div>
| + | |
| − | <div style="margin: 0.5em; clear: both; font-size: 95%; padding-top: 0.5em;">
| + | |
| − | [[Soubor:250px-Vyvojovy_diagram_zarovka-1-.png|thumb]]
| + | |
| − | mikroprocesorové aplikace s MCU 8051 [http://www.mountfield.cz/cs/stranky/jak-pecovat-o-bazenovou-vodu/diagram.gif ukázka vývojvého diagramu]
| + | |
| − |
| + | |
| − | pro SP použít: [ftp://obelix.sps-pi.cz/n/janousek/mikroLAB/30_SES%20sestavy/Blokova%20schemata Blokova schemata] kresleno v programu [http://www.proficad.cz/ Proficad]
| + | |
| − |
| + | |
| − | '''Úkoly:'''
| + | |
| − | | + | |
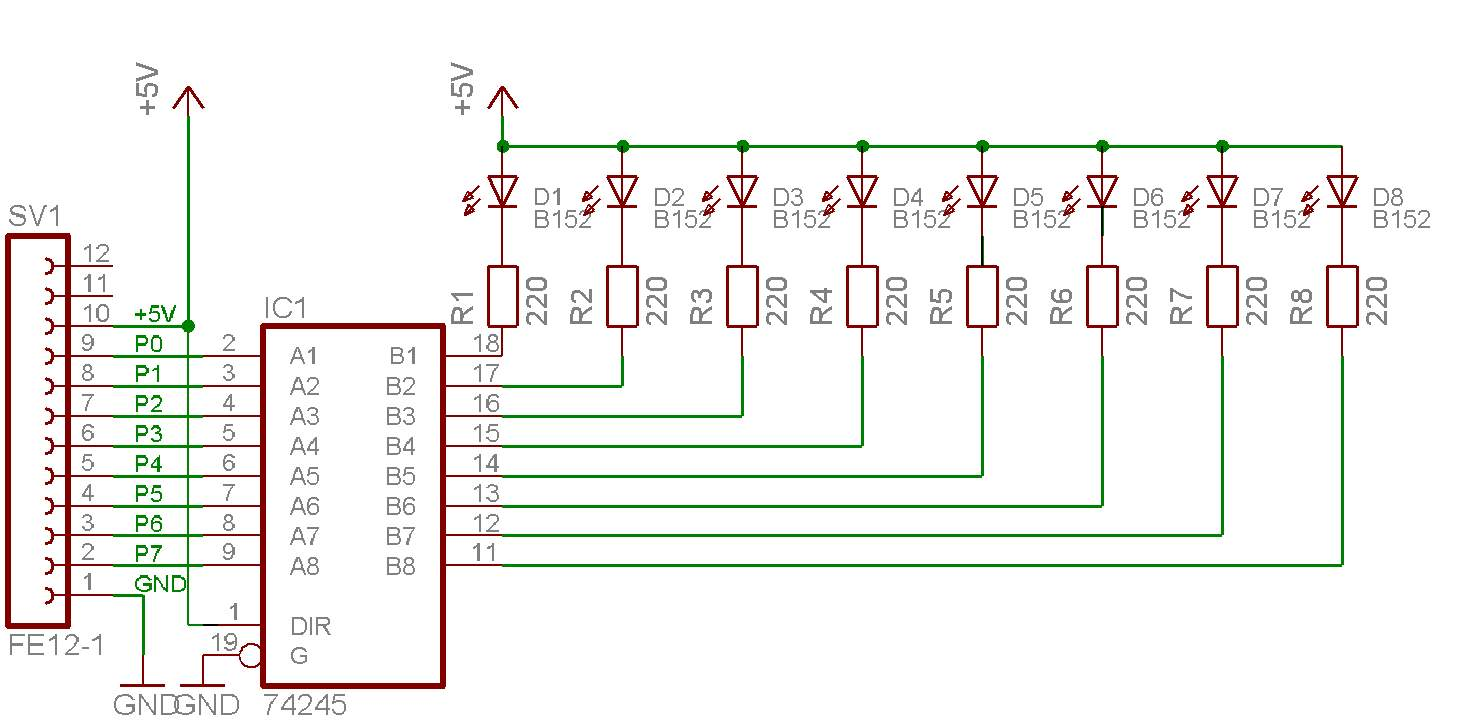
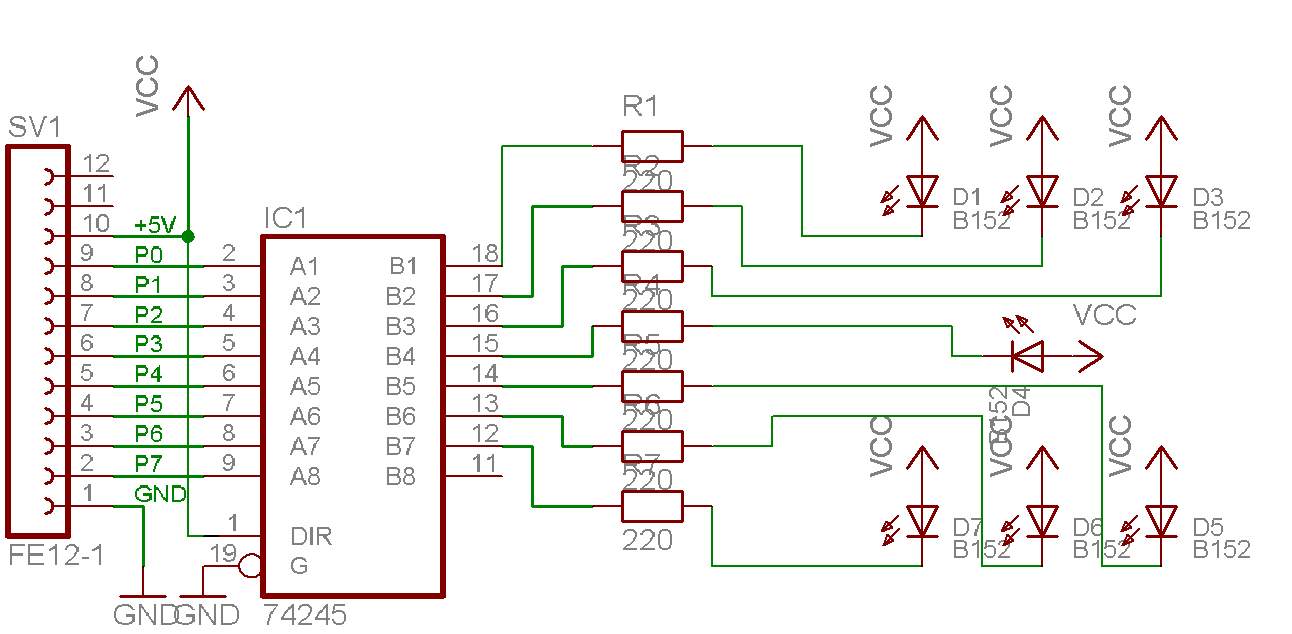
| − | # Připojte [http://wiki.sps-pi.com/images/7/70/Modul_LED.jpg OUT01 modul s LED] k [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/87_VYV%20Vyvojove%20sestavy/VYV01%20RD2%20vyvoj%20aplikaci%20s%208051/VYV01%20Popis%20vyvojove%20sestavy%20RD2Kit%20s%2089C51ED2.pdf vývojové sestavě RD2Kit] s 89C51ED2 a naprogramujte aplikaci pro ovládání modulu.
| + | |
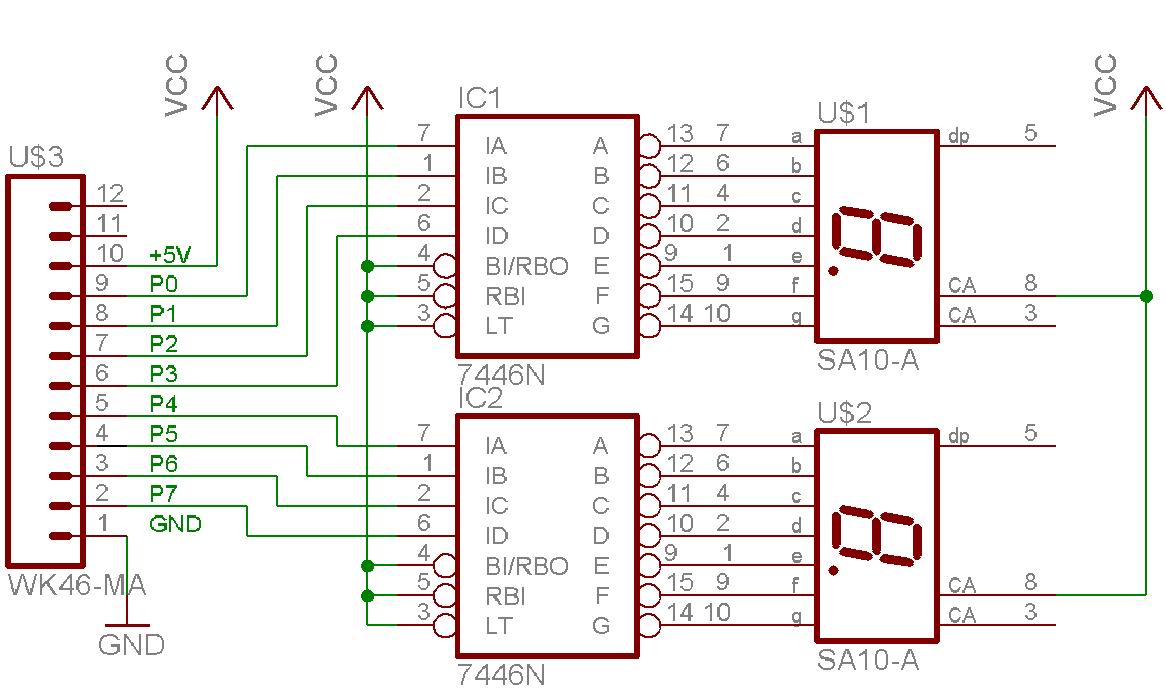
| − | # Připojte Soubor:[ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/28_OUT%20vystupni%20moduly/OUT02%20-%20dvoumistny%20display/OUT02%20dvoumistny%20display.pdf OUT02 dvoumistný display] k [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/87_VYV%20Vyvojove%20sestavy/VYV01%20RD2%20vyvoj%20aplikaci%20s%208051/VYV01%20Popis%20vyvojove%20sestavy%20RD2Kit%20s%2089C51ED2.pdf RD2Kit] a zprovozněte program pro postupné zobrazování 00 ....09, 10, 11, .........99,
| + | |
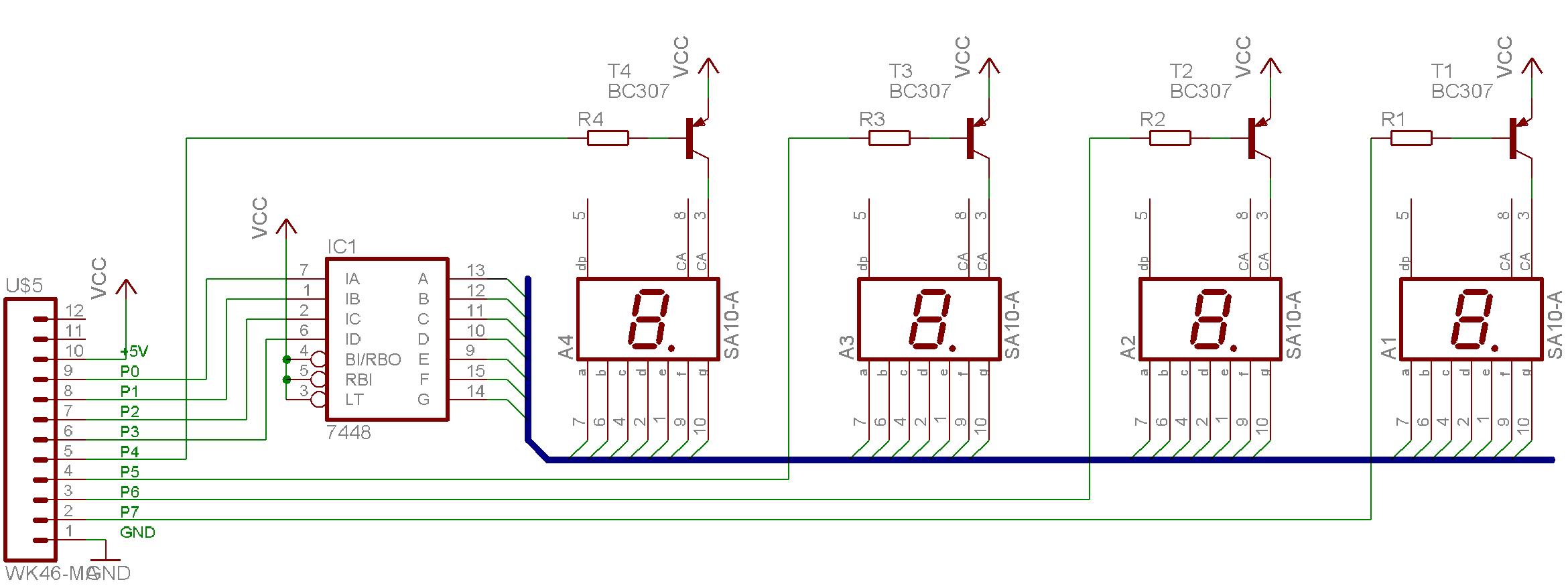
| − | # Připojte [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/28_OUT%20vystupni%20moduly/OUT03%20-%20disp%20MPX/sch.jpg OUT03 modul MPX] k [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/87_VYV%20Vyvojove%20sestavy/VYV01%20RD2%20vyvoj%20aplikaci%20s%208051/VYV01%20Popis%20vyvojove%20sestavy%20RD2Kit%20s%2089C51ED2.pdf RD2Kit] a zprovozněte program pro ovládání displeje
| + | |
| − | # [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/28_OUT%20vystupni%20moduly/OUT04%20-%20displ%20seriovy/Modul%20displeje%20se%20seriovym%20vstupem%20N102.pdf Modul displeje se seriovym vstupem N102] Připojte a ovládejte
| + | |
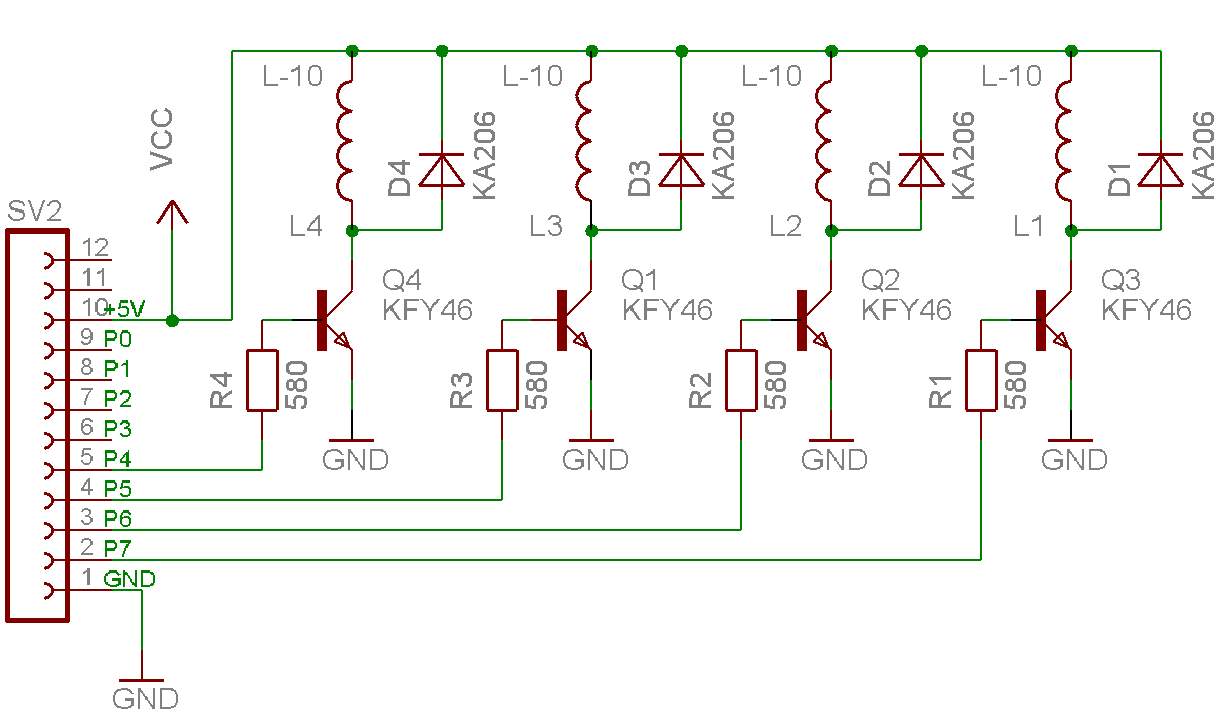
| − | # Ovládejte modul krokového motoru Soubor:[ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/28_OUT%20vystupni%20moduly/OUT06%20-%20modul%20krokoveho%20motoru/OUT06.jpg OUT06]
| + | |
| − | # Ovládejte modul stejnosměrného motoru [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/28_OUT%20vystupni%20moduly/OUT07%20-%20modul%20ss%20modulu/OUT07.jpg OUT07]
| + | |
| − | # Zprovozněte hrací kostku [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/28_OUT%20vystupni%20moduly/OUT09%20-%20modul%20LED%20kostky/OUT09.jpg OUT09]
| + | |
| − | # Zprovozněte '''křižovatku''' s MCU 8051 v sestavě vývojového kitu RD2 kit info: [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/30_SES%20sestavy/SES01%20Krizovatka SES01 Krizovatka]
| + | |
| − | # Naprogramujte MCU 8051 pro funkci '''jeřábu''' [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/30_SES%20sestavy/SES02%20Jerab SES02 Jerab] '''pračky''' [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/30_SES%20sestavy/SES03%20Pracka SES03 Pracka] '''plotru''' [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/30_SES%20sestavy/SES04%20Plotr%20-%20Souradnicovy%20zapisovac SES04 Plotr - Souradnicovy zapisovac] '''satelitního pozicionéru''' [ftp://obelix.sps-pi.cz/N/Janousek/mikroLAB/30_SES%20sestavy/SES05%20Satelitni%20pozicioner SES05 Satelitni pozicioner]
| + | |
| − | # [http://obelix.sps-pi.cz/n/Janousek%5CmikroLAB%5C30_SES%20sestavy%5CSES18%20Citac%20s%202%20x%20SA%5Codpo%C4%8D%C3%ADtavadlo%20z%2060%20do%2000%5CSES18b%20Odpo%C4%8D%C3%ADt%C3%A1vadlo.doc SES18] Odpočítávadlo: Modifikujte program v modulu SES18 tak, aby se po zapnutí objevilo na displeji číslo 60 a po jedné sekundě se obsah snižoval. Při dosažení 00 se odpočet zastaví a na výstupu P1.0 se objeví log. 1 na dobu 30 sec
| + | |
| − | | + | |
| − | doplňkové úlohy:
| + | |
| − |
| + | |
| − | * Otestujte SW [http://www.lancos.com/prog.html PonyProg] pro 89S2051 a 89S51
| + | |
| − | * Otestujte SW [http://hw.cz/constrc/lpt_isp_prog/ ISP_Prog] pro 89S2051 a 89S51
| + | |
| − | | + | |
| − | </div></div>
| + | |
| | | | |
| | |} | | |} |
| Aplikace mikroprocesorové techniky AplMIT
|
|
|
| Pojetí předmětu: |
Toto oddělení navštěvují studenti 4.ročníku oboru vzdělávání 26-41-M/01 Elektrotechnika.
|
| Cílové vědomosti: |
Znalost problematiky vývoje mikroprocesorové aplikace.
|
| Cílové dovednosti: |
Praktické aplikace teoretických poznatků při realizaci obvodů obsahující mikroprocesory.
|
| Organizace výuky: |
2,5 týdně = 5 hod 1 x za 3 x 14 dní při třech skupinách. 20hodin za rok pro jednu skupinu).
|
| Obsah cvičení: |
Realizace praktických úkolů:
- s programovatelným logickým automatem LOGO
- vyvoj mikroprocesorové aplikace s MCU např.:8051
- realizace mikroprocesorové aplikace s MCU
- programování robotů NXT a BOB.
|
| Učebna: |
D10
|
| Učitel: |
JA
|
| Tématický plán: |
PRA C4 D4 AplMit JA.doc
|
| Předpoklady: |
Znalosti a dovednosti z CIT MIT ELT2 INS2
|
| HW: |
LOGO RD2 kit EasySoft NXT BOB ROR + vše v učebně D10
|
| SW: |
LOGO Eagle MPLAB Ride51 Flip NXT-G BricxCC BS2 UP SAP Diagram Designer
|
| Doporučená literatura: |
LOGO MIT NXT BOB nebo na školním ftp: LOGO ftp: MIT (IN obvody, OUT obvody, sestavy ) ftp:NXT ftp:BOB
|
| Úkoly:
|
Z každého úkolu je nutné zpracovat dokumentaci t.j. jakýsi záznam o vykonané činnosti. Použít  předlohu dokumentu pro PP ( formát: Třída_PořadívTřídníKnize_Prijmeni_Jmeno_úkol.doc) předlohu dokumentu pro PP ( formát: Třída_PořadívTřídníKnize_Prijmeni_Jmeno_úkol.doc)
Takto by měl vypadat obsah adresáře každého studenta na konci školního roku
Odevzdání dokumentace k úkolům zde:
Dokumentace se odevzdává elektroniky nejpozději do začátku následujícího vyučovacího cyklu (do 14 dnů). Při neodevzdání je práce hodnocena známkou nedostatečně, která může být v klasifikačním období opravena jen na základě pisemně odevzdané dokumentace. POZOR max 1 list (2 strany).
|
| Opakovací otázky: |
Teoretické otázky Praktické otázky
|
| Objednávky: |
součástek na PP SOČ MP zde
|
| Náměty: |
Zajímavá zapojení s MCU např pro povinné nebo maturitní práce
|





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

