Z MediaWiki SPŠ a VOŠ Písek
| Aplikace mikroprocesorové techniky AplMIT
|
|
|
| Pojetí předmětu: |
Oddělení předmětu praktická cvičení navštěvují studenti 4.ročníku oboru vzdělávání 26-41-M/01 Elektrotechnika.
|
| Předpoklady: |
Znalosti a dovednosti z MIT • ELT2 • INS2, sešit z předmětu PRA (lze pokračovat)
|
| Cílové vědomosti: |
Znalost problematiky vývoje mikroprocesorové aplikace.
|
| Cílové dovednosti: |
Praktické aplikace teoretických poznatků při realizaci obvodů obsahující mikrořadiče.
|
| Výsledky vzdělávání žáka: |
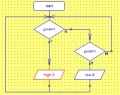
- navrhne vývojový diagram pro MIT sestavu
- navrhne vhodnou sestavu uP aplikace
- napíše program v asm pro uP 8051
- naprogramuje mikroprocesor
- použije robotická čidla
- ovládá motory u robota NXT
- naprogramuje robota v SW Lego NXT
- vyřeší robotickou úlohu
- vybere vhodná robotická čidla
- ovládá motory u robota BOE-BOT
- naprogramuje robota Boe-Bot
- modifikuje program pro robota
|
| Organizace výuky: |
3 hodiny týdně pro jednu skupinu v jednom pololetí.
|
| Učebna: |
D07
|
| Učitel: |
JA
|
| Deník:
|
Po každém splněném úkolu např. LOGO, Vývoj MIT aplikace, NXT, BOB atd. je nutné provést zápis dle  vzoru do deníku s použitím předpřipravené předlohy, a odevzdat do adresáře N:/Janousek/Temp/Trida, vzoru do deníku s použitím předpřipravené předlohy, a odevzdat do adresáře N:/Janousek/Temp/Trida,
Pozn.: Dokumentace se odevzdává elektroniky nejpozději do začátku následujícího vyučovacího cyklu. Při neodevzdání je práce hodnocena známkou nedostatečně.
|
| Klasifikace:
|
- průběžně na základě praktických výsledků v hodině
- deník po každém úkolu
- plnění dílčích úkolů při realizaci povinné ročníkové práce
|
| HW:
|
LOGO • RD2 kit • NXT • BOB + vše v učebně D10
|
| SW:
|
LOGO • MCU 8051 IDE • Flip • NXT-G • STAMP
|
|
|
Tools: Eagle • ProfiCAD • Diagram Designer
Bonus: MPLAB • BricxCC • UP • SAP
|
| Info:
|
nebo na  v adresáři N:/janousek/mikroLAB v adresáři N:/janousek/mikroLAB
|
|
| Otázky k opakování na MAT zkoušku
|
| Poznámka
|
Toto jsou možná zadání u praktické maturitní zkoušky
|
Teoretické otázky:
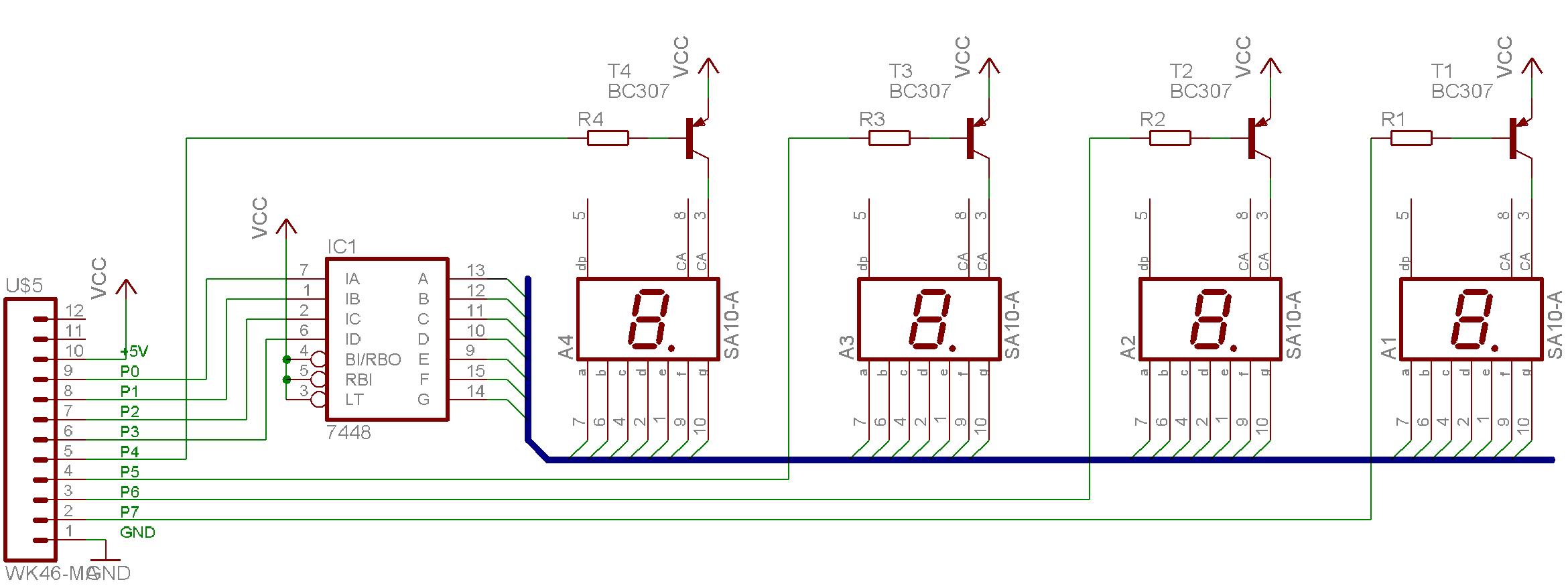
- modul dvoumístné zobrazovací jednotky, kterou lze řídit maximálně 6 informačními vodiči.
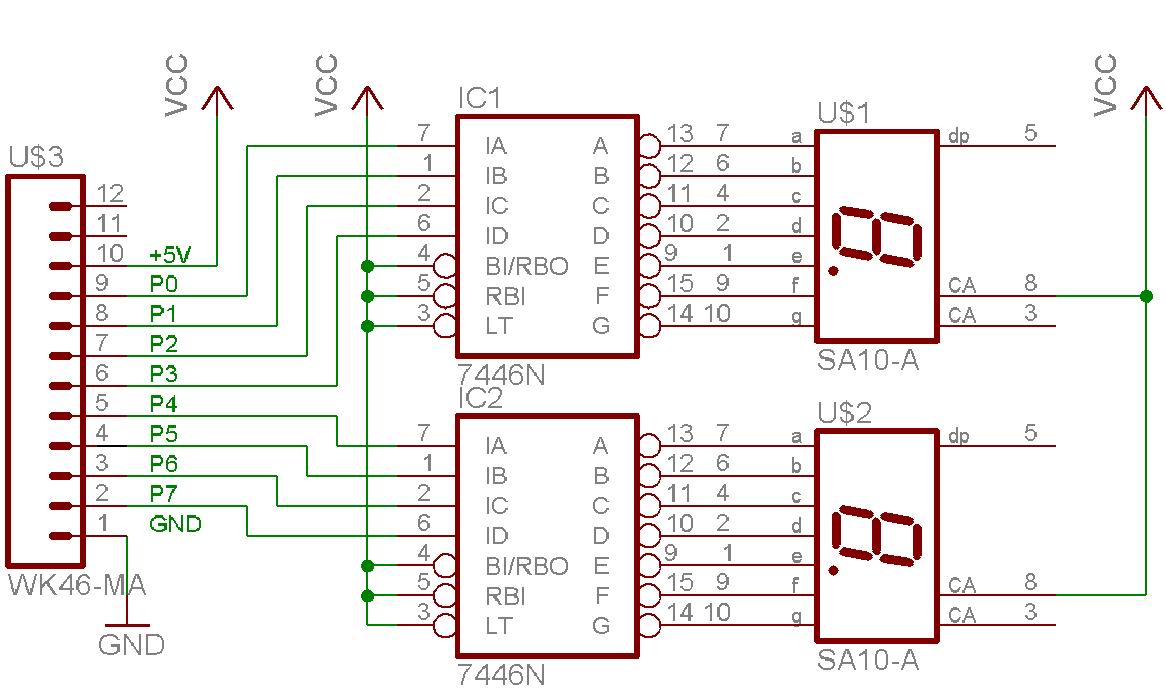
- modul dvoumístné zobrazovací jednotky, kterou lze řídit maximálně 2 informačními vodiči (GND a Vcc se nepočítá).
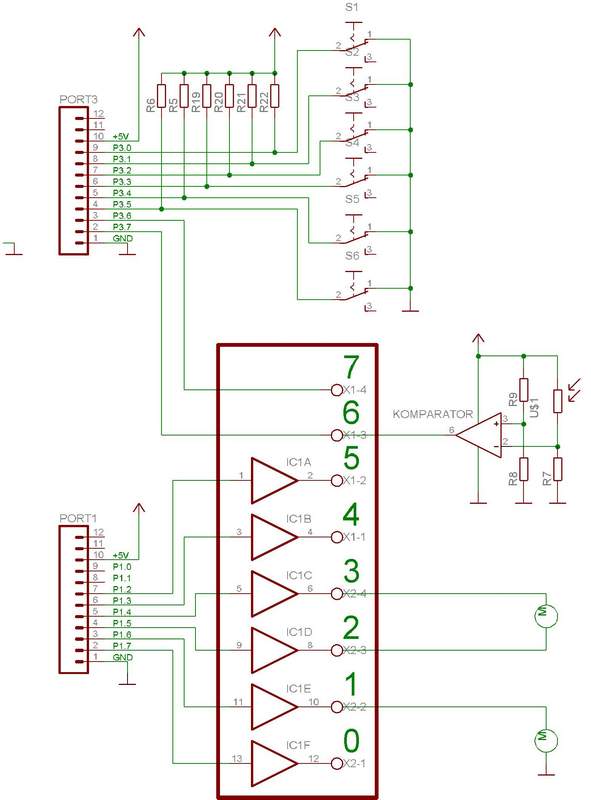
- modul stejnosměrného motoru pro ovládání točí doleva/ doprava /netočí
- výstupní modul akustické signalizace jež bude obsahovat telefonní sluchátko, který bude vydávat zvuk pouze v případě, kdy na řídící vstup bude přivedna logická jednička.
- modul umožňující převod teplota – frekvenci, případně teplota – střída
- čidlo teploty, které na výstupu změní logickou úroveň z “0” do “1” při zmenšení teploty pod nastavenou mez (např 20°)
- čidlo světla, které na výstupu změní logickou úroveň z “0” do “1” při zvětšení osvětlení nad nastavenou mez.
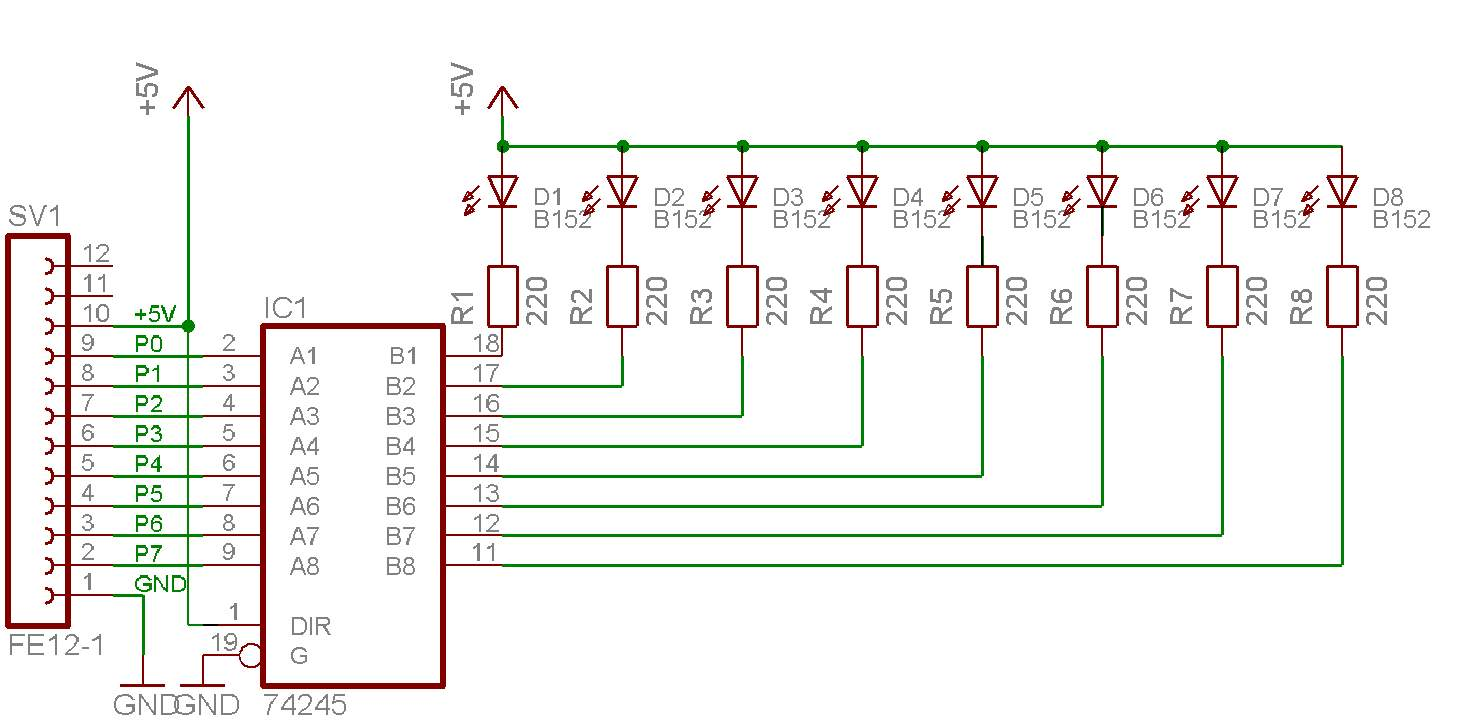
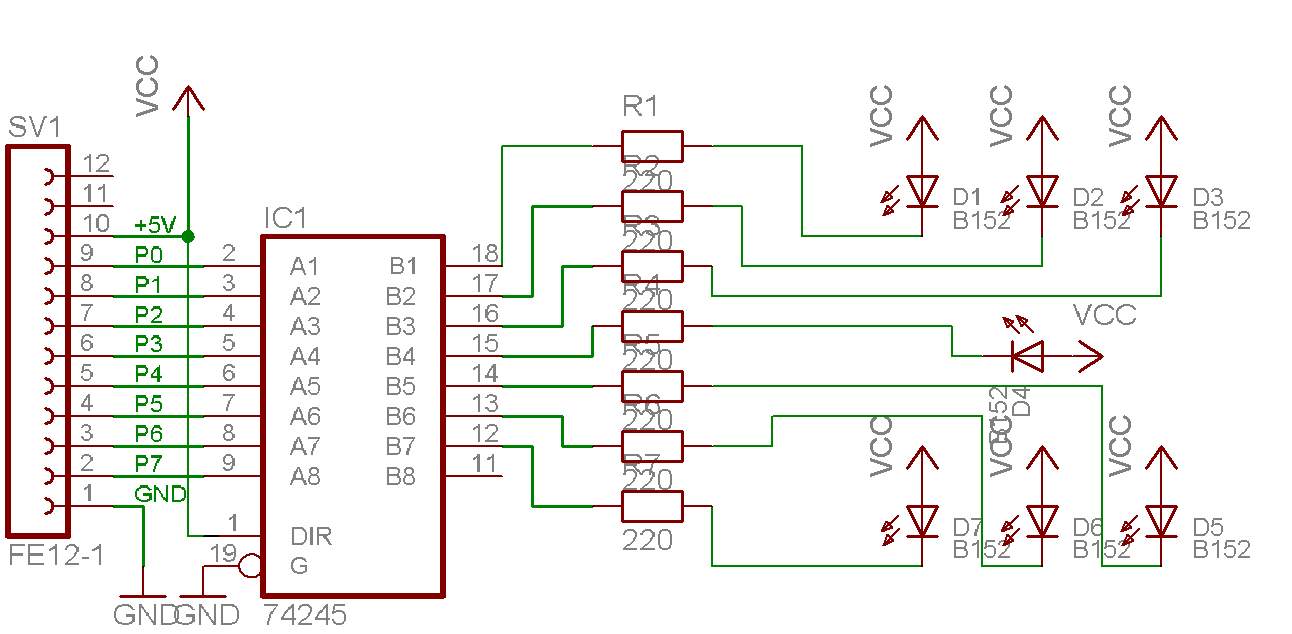
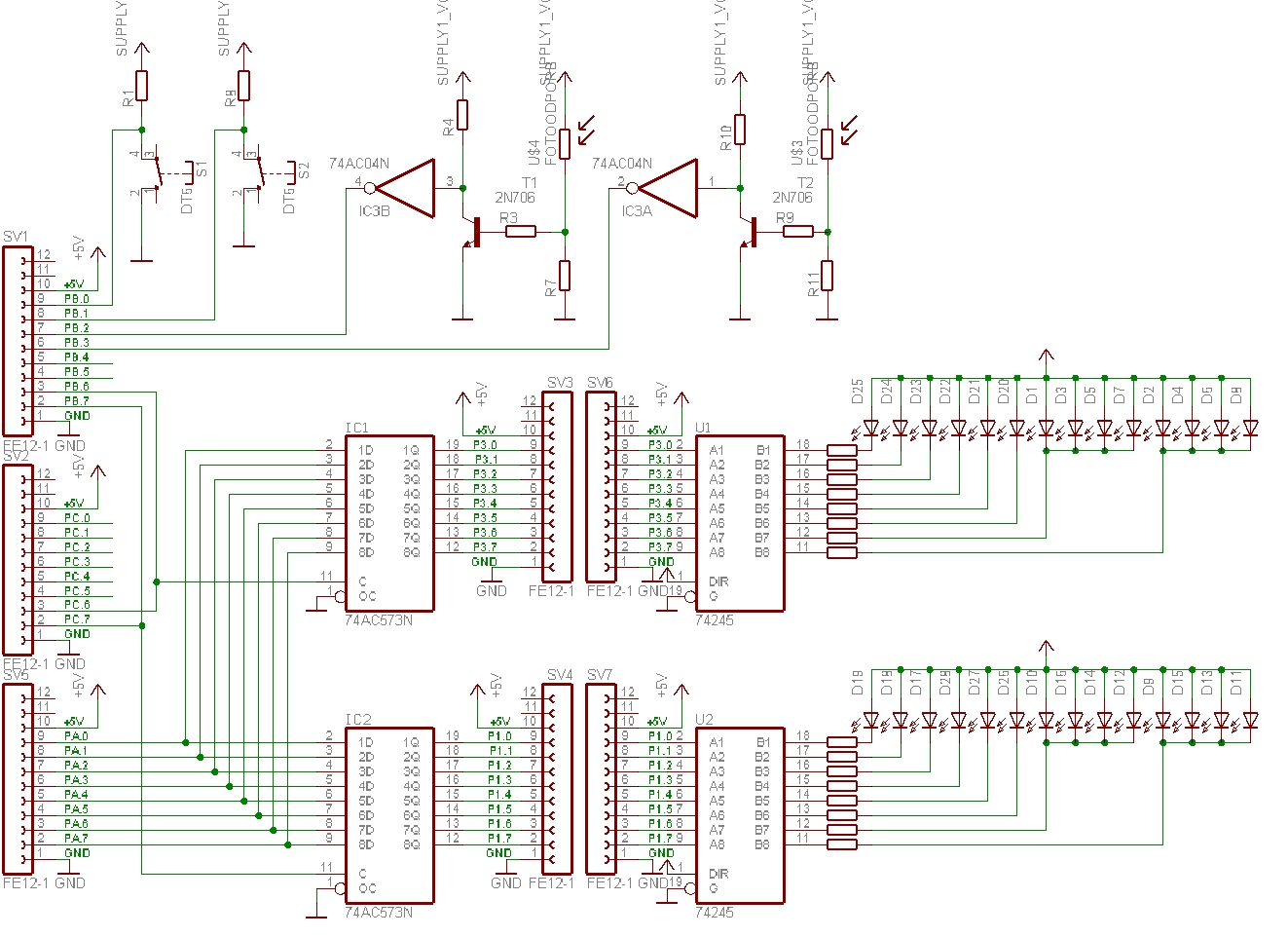
- interface pomocí jehož lze rozšířit osmibitovou výstupní bránu na šestnástibitovou (např. pro řízení světelné křížovatky potřebují k řízení 16 signálů a máme k dispozici pouze 10.
- připojení automatické pračky s výstupy pro napouštění vody, čerpadlo, ohřev, prací buben a vstupy, kde se hlídá minimální hladina vody, maximální hladina vody a dosažená teplota
- i/o obvody umožňující připojit výkonové obvody (světelné blinkry, siréna, dveřní kontakty apod.) k mikroprocesoru
- Úkol č.2 Proveďte návrh blokové schéma pro modul ze zadání
- Úkol č.3 Proveďte popis funkce modulu
- Úkol č.4 Nakreslete el. schéma v Eagle
- Úkol č.5 Zpracujte dokumentaci
Praktické otázky:
- ovládání 7segmentového displaye ovládaného s libovolné mikroprocesorové aplikace
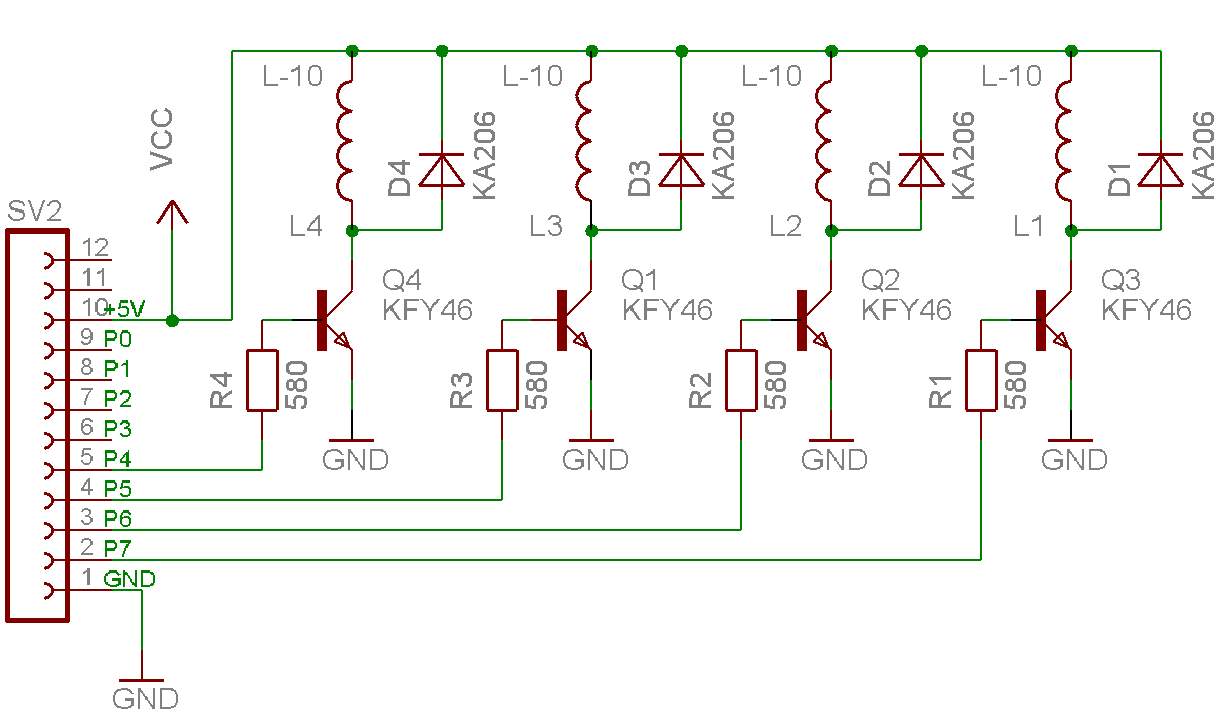
- krokový motůrek řízený MCU. Proveďte otáčení motůrku jedním směrem. Proveďte změnu směru otáčení v závislosti na sepnutí tlačítka.
- modul hrací kostky s MCU. Na kostce budou zobrazovány všechny hrací varianty v závislosti na zadání vstupní informace z modulu spínačů IN01.
- jeřáb. Proveďte otáčení jeřábu jedním i druhým tlačítkem.
- automatickou pračku řízenou pomocí MCU.
- poplašné zařízení řízené MCU. Předveďte činnost ALARMU tak, aby po zapnutí napájení LED svítila 5 s (doba imunity) a po té začala LED blikat (ALARM hlídá). V případě zmáčknutí tlačitka je vyvolán akustický poplach. Celý děj se znovu opakuje.
- počítadlo impulsů. Display + některé ze vstupních modulů či čidel
- robota NXT (BOB) pohybující se podle černé linky.
- robota NXT (BOB) pohybující se v bludišti od startu k cíli.
- robota NXT (BOB) pohybující se vpřed dokud se nepřiblíží k překážce na vzdálenost 20cm. Pak se zastaví, otočí se cca o 160° a opět pokračuje vpřed. Celý cyklus se opakuje.
- Úkol č.2 Vyberte dle zadání vhodné komponenty
- Úkol č.3 Nakreslete vývojový diagram
- Úkol č.4 Napište program v vhodném vývojovém prostředí
- Úkol č.5 Sestavu realizujte a vyzkoušejte
- Úkol č.6 Zpracujte dokumentaci
Zdroj informací v pdf na šk. síti:  Teoretické otázky Praktické otázky Teoretické otázky Praktické otázky
|
Témata na cvičení
Basic:
Clasic:
NEW:
Excelent:
Bloková schémata v ProfiCADu
Vývojové diagramy v PICAXE
Simulace
LOGO
|
- Navrhněte Kombinační logický obvod s 3vstupy, zjistěte pravdivostní tabulku. vzor: 12.06_navrh_KLO_LOGO.lsc 12.06_navrh_KLO_LOGO.lld
- Realizujte schodišťové zapojení pro 2 a více vstupů, t.j. kterýmkoli přepínačem-vypínačem vypnout-zapnout lit.
- Navrhněte stykač pro ovládání osvětlení pomocí tlačítka ZAP a pomocí tlačítka VYP + další výstup, který ovládá blikající maják
- Navrhněte stykač s jedním spínaným vstupem, který aktivací sepne a následnou aktivací vypne atd.
- Realizujte časové relé pro jeden spínaný vstup, který aktivací sepne a po 20 sec. vypne. Každá aktivace vstupu dřív než 20 sec. výstup vypne.
- Pojezdová brána: jeden spínaný vstup, který aktivací sepne 1 výstup. Následně vstup výstup vypne, následně vstup sepne 2. výstup, následně vstup vše vypne atd.
- cv6. + doba sepnutého výstupu omezena na 20 sec.
DÚ:
- Pojezdová brána: stejná funkce + časově omezené výstupy na 15 sec.
- Zpracovat PP podle vzoru
- Návrh KLO s LOGO! SW
- Pulzní generátor
- Impuls_01
- Komfortní spínač
- Vzorová aplikace pro vodní čerpadlo
|
MIT vývoj aplikace s MCU
Robotika s NXT
|
- Sestavte robota, napište program a vyzkoušejte proto, aby robot:
- se pohyboval vpřed
- se pohyboval vpřed do vzdálenosti 1m
- se pohyboval vpřed ve čtyřúhelníku o straně cca 0,5m
- jel rovně a zastavil na 60 cm vzdáleném místě označeném černou lepící páskou
- se pohyboval dokud nebude stisknutý dotykový senzor
- se rozjel na zvukový povel
- jel ve čtyřúhelníku a zastavil se u počátečního bodu.
- jel v před a pokud čidlo ultrazvuku zjistí překážku se zastavil, kousek zacouval, otočil se o 160° a celý cyklus pokračoval
- s pomocí čidla světla pohyboval po čáře
- Start ve vzdálenosti 60 cm od černé linie. Robot najde dráhu a sleduje ji
- Naučte robota šplhat přes minimálně 2,5 cm tlustou knihu.
- Najde předmět, uchopí a přiveze
- Nakombinujte různá čidla pro pohyb robota
|
Robotika s BOB
Úkoly jsou zcela identické jako s robotem NXT ale tentkráte s robotem BOB
|
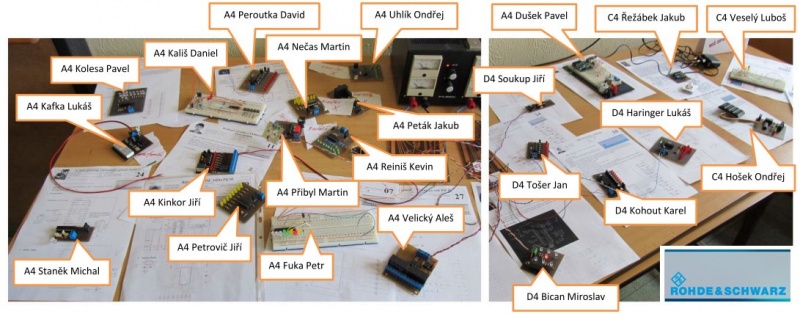
Realizace povinné ročníkové práce s MCU
Přehled povinných prací předmětu PRA





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
