|
|
| Řádka 1: |
Řádka 1: |
| | [[Soubor:D10_AplMIT_s1.jpg|200px|left]] | | [[Soubor:D10_AplMIT_s1.jpg|200px|left]] |
| | + | |
| | + | {| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" |
| | + | | colspan="2" style="text-align: center; font-size: larger; background-color: lightgreen;" | '''''TP od roku 2017''''' |
| | + | |- |
| | + | | |
| | + | # - BOZP – řády odborných učeben |
| | + | # - Vývoj MIT aplikace s UNI deskou |
| | + | # - Realizace mikroprocesorové sestavy |
| | + | # - Programování světelné křižovatky |
| | + | # - Programování aplikace automatické pračky |
| | + | # - Zpracování povinné práce |
| | + | # - Návrh a editace elektrického schéma a DPS s prvky SMD |
| | + | # - SMT – význam a výhody, pájení, horkovzdušná pájecí soustava |
| | + | # - Zpracování povinné práce |
| | + | # - Vývoj aplikace s robotem – zadání úloh 1 |
| | + | # - Vývoj aplikace s robotem – zadání úloh 2 |
| | + | # - Vývoj aplikace s robotem – zadání úloh 3 |
| | + | # - Zpracování povinné práce |
| | + | # - Opakování k maturitě |
| | + | |} |
| | | | |
| | {| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" | | {| class="toccolours" cellpadding="5" style="float: right; clear: right; margin: 0 0 1em 1em; font-size: 85%; width: 35em" |
| Cvičení
|
 PRA C4 D4 AplMit JA.doc PRA C4 D4 AplMit JA.doc
- BOZP – řády odborných učeben,
- náplň činnosti v školním roce
- klasifikace v předmětu
- SOČ
- opakování MIT, LOGO
- Zadání Povinné práce v předmětu Praktická cvičení s MCU
- Výběr z témat zde, registrace a návrh schéma v Eagle (září)
- Objednání součástek zde (říjen)
- Návrh DPS (listopad)
- Zpracování dokumentace dle
 vzoru za použití předlohy. vzoru za použití předlohy.
- Výsledek (sch, pcb, hex, (asm, c, cpp, ...= source) a pdf(doc) uložit do vlastního adresáře N:/Janousek/Temp/Trida (prosinec)
- Výroba DPS (leden)
- Osazení (únor)
- Oživení (březen)
- Účast aspoň ve výstavní části SOČ (duben)
- Popis vývoje MCU aplikace
- Programování světelné křižovatky
- Programování mikroprocesoru
- Realizace mikroprocesorové sestavy
- Programování aut. pračky
- ss motor, krokový motor, servo
- Zpracování povinné práce (max. 1 list)
- Hlavička (foto, název práce, třída, jméno...)
- Blokové schéma
- Elektrické schéma
- Montážní schéma
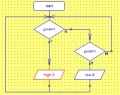
- Vývojový diagram
- Postup vývoje MIT aplikace
- Napsat program v IDE....
- Zkompilovat zdrojový kód
- Odsimulovat
- Naprogramovat .....(MCU) v HW..... s SW....:
- Aplikaci otestovat
- Zdrojový program (asm, C, BAS)
- Použitý SW:
- Použitý HW:
- Zdroje informací
- Popis robota NXT, ukázka aplikací (jízda, reakce na čidla)
- Vývoj aplikace s robotem NXT
- Zadání robotických úloh – bludiště
- Vývoj mit aplikace s robotem Boe-Bot
- Řešení úloh – bludiště, motorová sekačka, kompas
- Zadání robotických úloh – motorová sekačka
- Opakování k maturitě
- Opakování k maturitě
|
| Otázky k opakování na MAT zkoušku
|
| Poznámka
|
Toto jsou možná zadání u praktické maturitní zkoušky
|
Teoretické otázky:
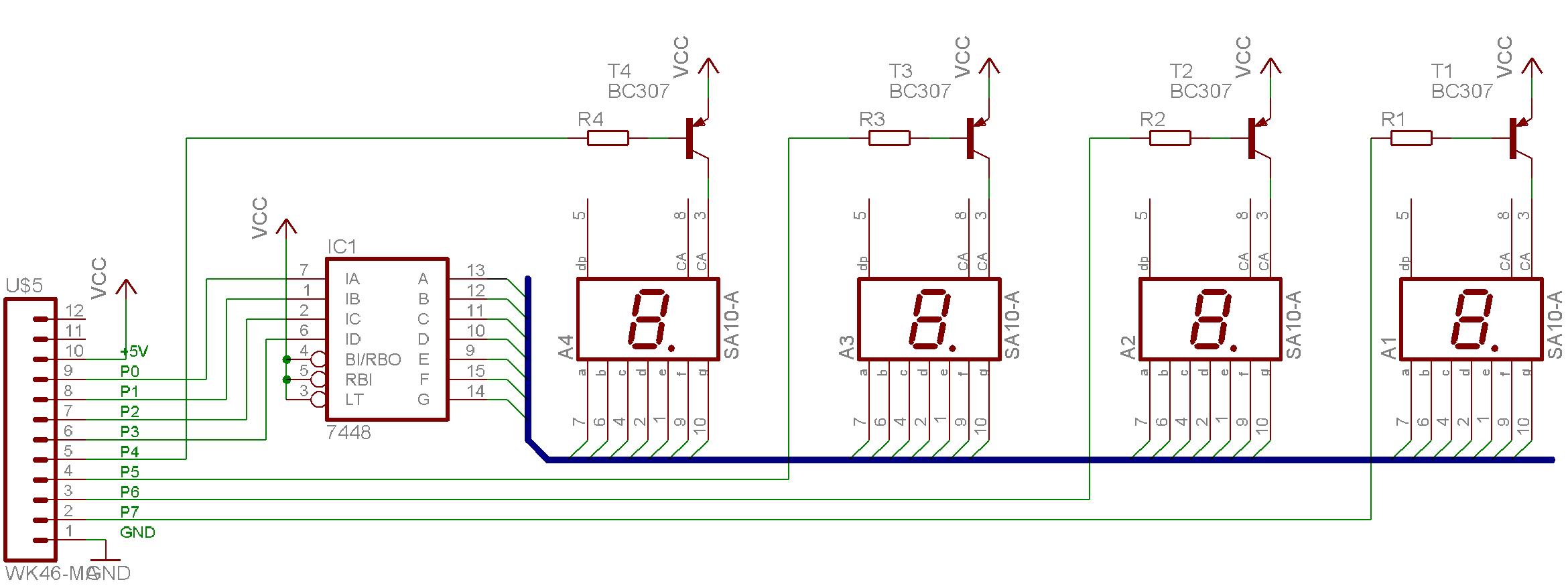
- modul dvoumístné zobrazovací jednotky, kterou lze řídit maximálně 6 informačními vodiči.
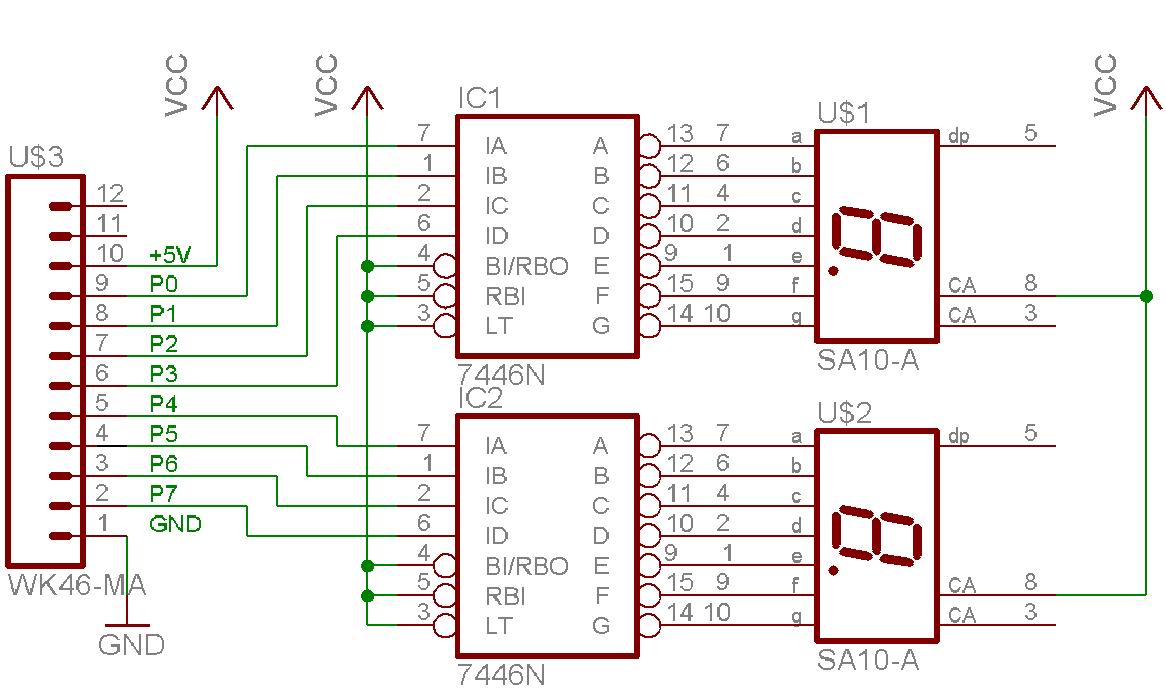
- modul dvoumístné zobrazovací jednotky, kterou lze řídit maximálně 2 informačními vodiči (GND a Vcc se nepočítá).
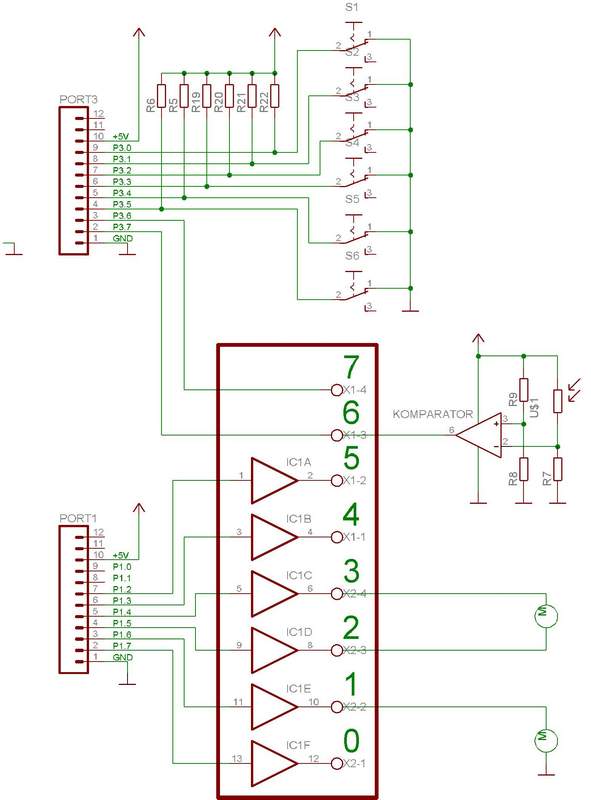
- modul stejnosměrného motoru pro ovládání točí doleva/ doprava /netočí
- výstupní modul akustické signalizace jež bude obsahovat telefonní sluchátko, který bude vydávat zvuk pouze v případě, kdy na řídící vstup bude přivedna logická jednička.
- modul umožňující převod teplota – frekvenci, případně teplota – střída
- čidlo teploty, které na výstupu změní logickou úroveň z “0” do “1” při zmenšení teploty pod nastavenou mez (např 20°)
- čidlo světla, které na výstupu změní logickou úroveň z “0” do “1” při zvětšení osvětlení nad nastavenou mez.
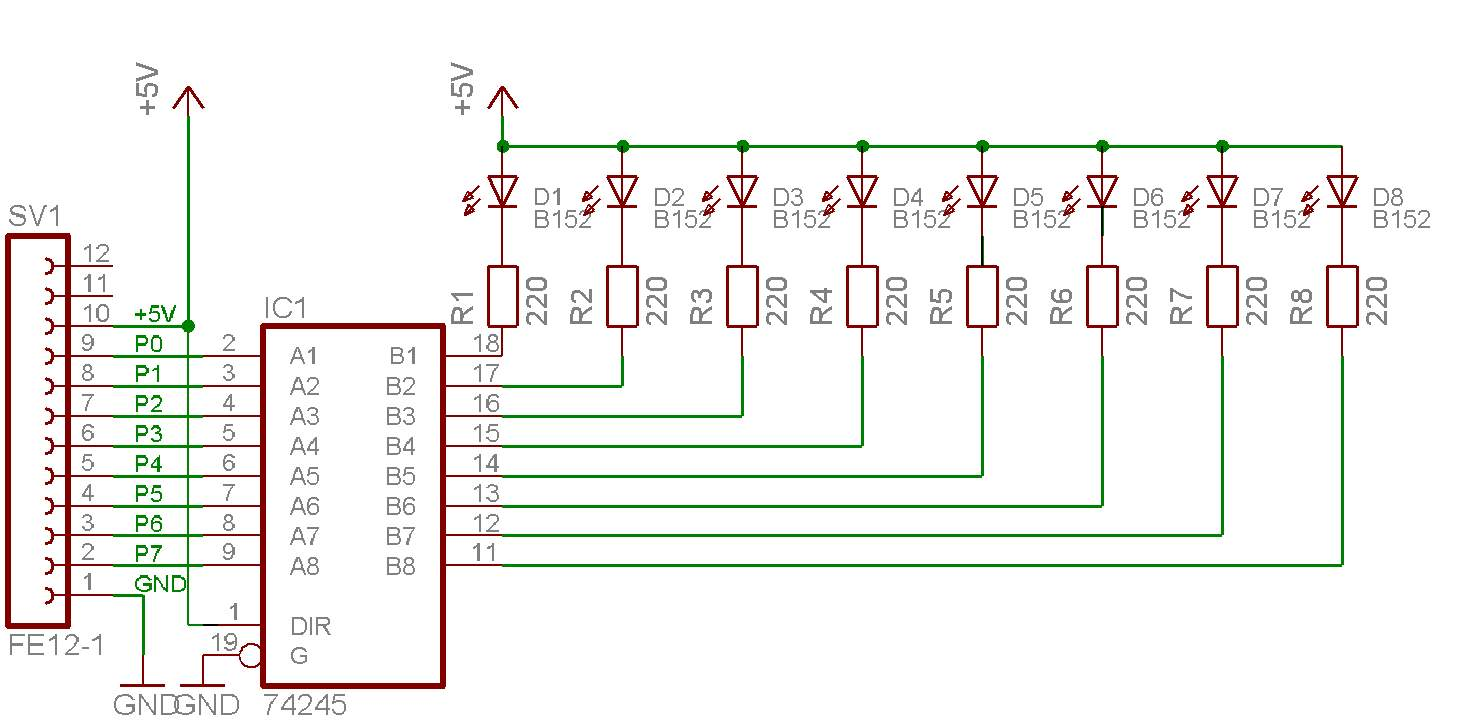
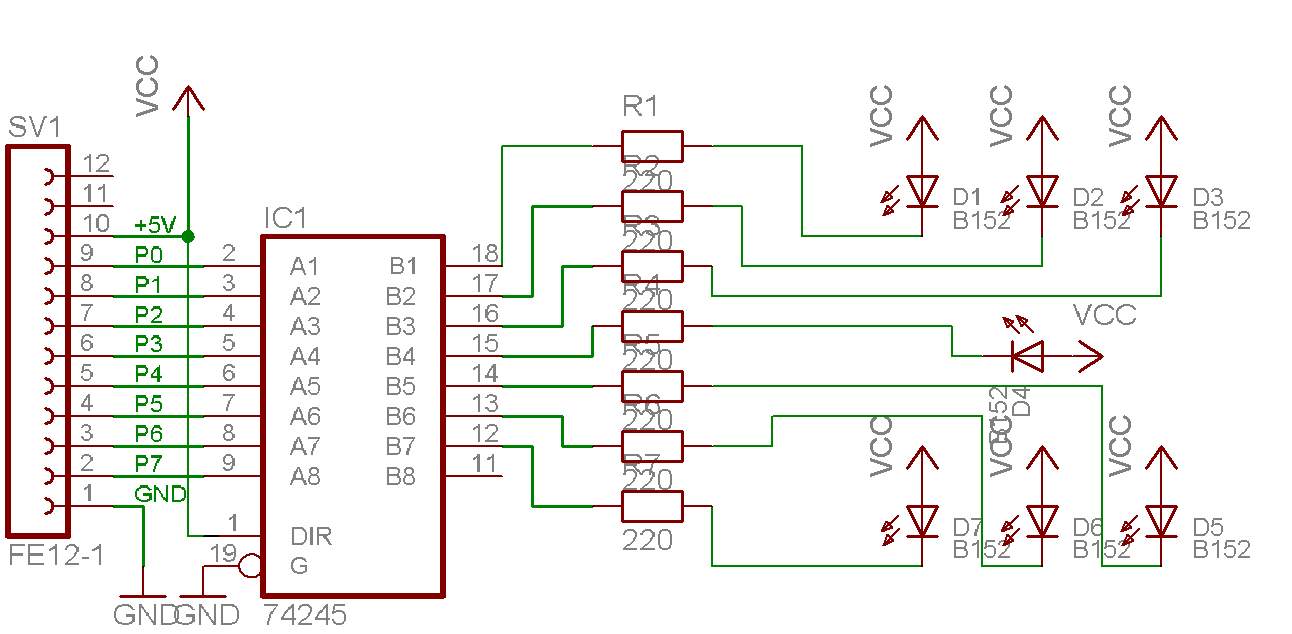
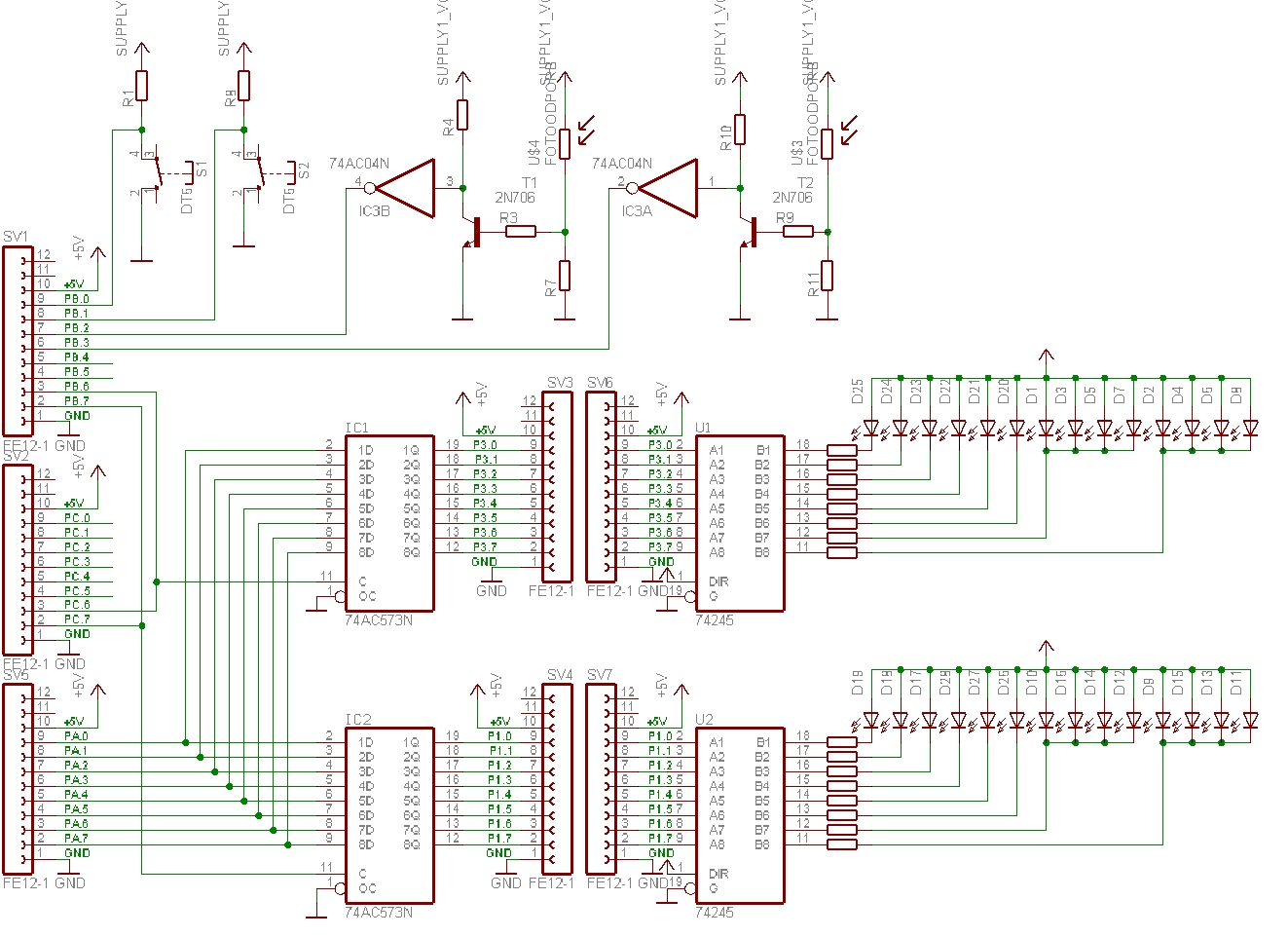
- interface pomocí jehož lze rozšířit osmibitovou výstupní bránu na šestnástibitovou (např. pro řízení světelné křížovatky potřebují k řízení 16 signálů a máme k dispozici pouze 10.
- připojení automatické pračky s výstupy pro napouštění vody, čerpadlo, ohřev, prací buben a vstupy, kde se hlídá minimální hladina vody, maximální hladina vody a dosažená teplota
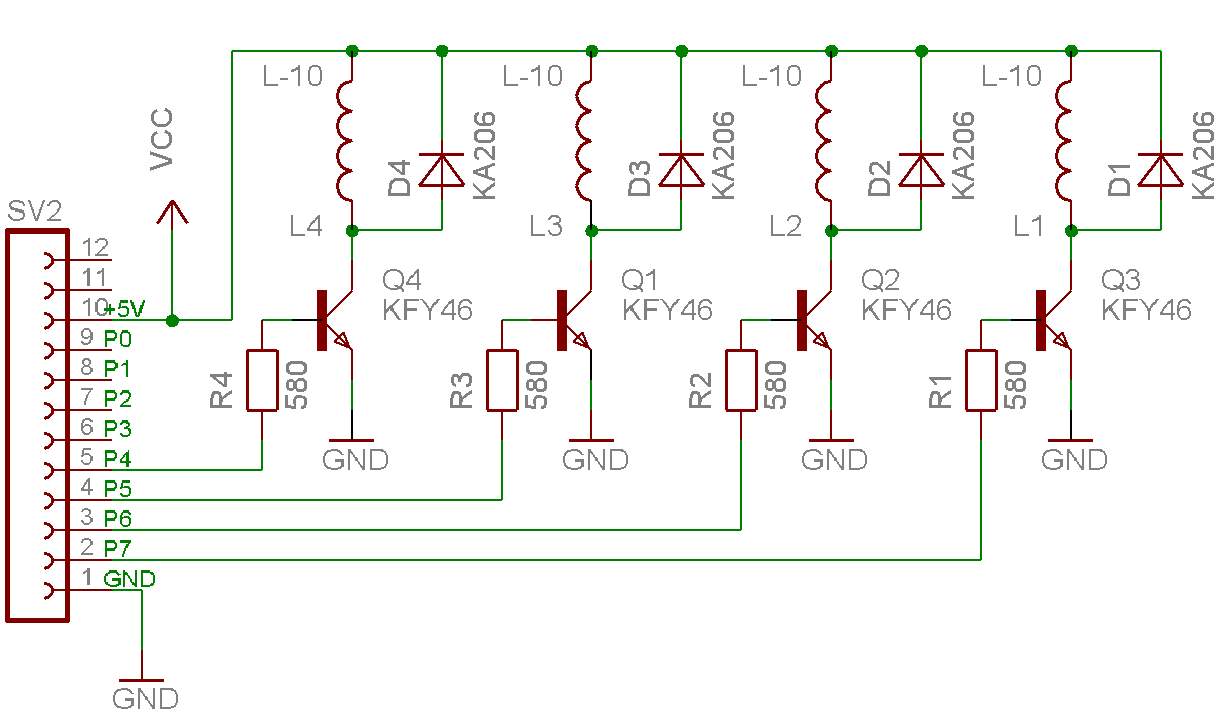
- i/o obvody umožňující připojit výkonové obvody (světelné blinkry, siréna, dveřní kontakty apod.) k mikroprocesoru
- Úkol č.2 Proveďte návrh blokové schéma pro modul ze zadání
- Úkol č.3 Proveďte popis funkce modulu
- Úkol č.4 Nakreslete el. schéma v Eagle
- Úkol č.5 Zpracujte dokumentaci
Praktické otázky:
- ovládání 7segmentového displaye ovládaného s libovolné mikroprocesorové aplikace
- krokový motůrek řízený MCU. Proveďte otáčení motůrku jedním směrem. Proveďte změnu směru otáčení v závislosti na sepnutí tlačítka.
- modul hrací kostky s MCU. Na kostce budou zobrazovány všechny hrací varianty v závislosti na zadání vstupní informace z modulu spínačů IN01.
- jeřáb. Proveďte otáčení jeřábu jedním i druhým tlačítkem.
- automatickou pračku řízenou pomocí MCU.
- poplašné zařízení řízené MCU. Předveďte činnost ALARMU tak, aby po zapnutí napájení LED svítila 5 s (doba imunity) a po té začala LED blikat (ALARM hlídá). V případě zmáčknutí tlačitka je vyvolán akustický poplach. Celý děj se znovu opakuje.
- počítadlo impulsů. Display + některé ze vstupních modulů či čidel
- robota NXT (BOB) pohybující se podle černé linky.
- robota NXT (BOB) pohybující se v bludišti od startu k cíli.
- robota NXT (BOB) pohybující se vpřed dokud se nepřiblíží k překážce na vzdálenost 20cm. Pak se zastaví, otočí se cca o 160° a opět pokračuje vpřed. Celý cyklus se opakuje.
- Úkol č.2 Vyberte dle zadání vhodné komponenty
- Úkol č.3 Nakreslete vývojový diagram
- Úkol č.4 Napište program v vhodném vývojovém prostředí
- Úkol č.5 Sestavu realizujte a vyzkoušejte
- Úkol č.6 Zpracujte dokumentaci
Zdroj informací v pdf na šk. síti:  Teoretické otázky Praktické otázky Teoretické otázky Praktické otázky
|






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
